|

School
of Arts
|
|
<Temblo>

|
|
robotic
chinese temple blocks by
- Thomas Strypsteen
- Stijn Smeets
- Tim Duerinck
supervised by
dr.Godfried-Willem
RAES
2012-2013.
|
Technical Description
Temple blocks are in origin Chinese percussion instruments used in religious
ceremonies. The instruments can also be found in this context in Korea and Japan.
It is a carved hollow wooden instrument with a large slit. In its traditional
form, the wooden fish, the shape is somewhat bulbous. From an acoustic point
of view they function much like a tuning fork and their cavity like a Helmholtz
resonator. The pitch of both elements should be matched for a good hollow and
resonating sound. As such it is a synergetic construction. 
Temple blocks are often found in the percussion section of classical orchestras
in a simplified (and generally poorly sounding...) rectangular shape. Most commonly
one will encounter them in a group of five blocks of different pitches. The
picture below shows such a set of five chinese temple blocks, arranged on a
stand to comfort percussionists, dating from the interbellum.

The original chinese instruments can be found in widely varying sizes: from
close to 1 meter for the very largest ones up to really tiny ones not larger
than 3 cm. The very small ones have a sharp and very penetrating tone. A set
of very small ones can be seen on this picture:  They
are hand carved from a single piece of relatively soft wood and covered with
a thick layer of mostly red chinese lacquer. The lacquer not only protects the
wood against moisture and the impact of the beater, but also changes the sound
somewhat in making the attack sharper. The traditional lacquer is derived from
urushiol, a substance from the toxicodendron vernicifluum and has the property
to form a natural polymere in the presence of moisture and medium heat. Once
cured, it is hard and stable but the fresh substance itself gives cause to quite
severe allergic reactions when brought in contact with the skin. In China the
temple block is usually placed on a cushion.
They
are hand carved from a single piece of relatively soft wood and covered with
a thick layer of mostly red chinese lacquer. The lacquer not only protects the
wood against moisture and the impact of the beater, but also changes the sound
somewhat in making the attack sharper. The traditional lacquer is derived from
urushiol, a substance from the toxicodendron vernicifluum and has the property
to form a natural polymere in the presence of moisture and medium heat. Once
cured, it is hard and stable but the fresh substance itself gives cause to quite
severe allergic reactions when brought in contact with the skin. In China the
temple block is usually placed on a cushion.  Mounting them in a stand is a western adaptation. Although they produce a quite
distinct tone and pitch they are never used as pitched percussion instruments.
Each temple block has its own individual beater, as the weight and hardness
of the beater head has to match the size and weight of the block to be struck.
Mounting them in a stand is a western adaptation. Although they produce a quite
distinct tone and pitch they are never used as pitched percussion instruments.
Each temple block has its own individual beater, as the weight and hardness
of the beater head has to match the size and weight of the block to be struck.
 The original chinese
beaters are rarely used by percussionists in western ensembles and orchestras.
Medium hard cloth covered vibraphone or marimba mallets give a good sound. Using
too hard mallets (drumsticks, hard nylon beaters...) lead invariably to destruction
of the templeblock, first by cracking the lacquer, secondly by destroing the
wood itself.
The original chinese
beaters are rarely used by percussionists in western ensembles and orchestras.
Medium hard cloth covered vibraphone or marimba mallets give a good sound. Using
too hard mallets (drumsticks, hard nylon beaters...) lead invariably to destruction
of the templeblock, first by cracking the lacquer, secondly by destroing the
wood itself.
The idea of making an automated set of temple blocks arose from educational
needs: In 2012 we were asked to teach a class on modern instrument building
and automation for the students enrolled in the instrument building program
at the School of Arts (Ghent University College). After discussing the topics
to be treated, we decided with the students to set up a building project that
could be finished within a single academic year. Hence the choice of a percussion
robot, as this seemed to require the minimum of preliminary research, without
being a trivial undertaking. The fact that it would constitute a most welcome
addition to the robot orchestra and not merely an academic project seemed a
challenge to the students involved. The building project was started in october
2012 and the first automated sounds came out in february 2013. By the month
may, Temblo made his final entry into the robot orchestra and many composition
students wrote a piece for the newborn robot.
Complete Midi Implementation
table for <Temblo>:
Midi Channel: 12 (counting from 0)
| Command |
meaning / effect |
remarks
(+= implemented)
|
| NOTE OFF (128 +12) |
releases the hammers instantly for notes 60-65 and 72-77
switches off the lights for notes 120-127, switches off the ratchet
motor.
|
+
|
| NOTE ON (144+12) |
note range 60-65 (low blocks) and 72- 77 (high blocks), velo implemented.
note 69: ratchet, velo steers the rotation speed.
note range 120-125: lights: here the velo byte steers the flashing
speed
note range 126-127:lights: here the velo byte steers the dimming
(light strenght)
|
+ |
| KEY PRESSURE (160_12) |
implemented for the lights only. (notes 120,121,122,123,124,125,
127) |
+ |
| CONTROLLERS: 176+12 |
nr.66: Power on/off switch
nr 123: All notes OFF (emergency note off) |
+ |
| PROGRAM CHANGE 192 + 12 |
Not implemented |
No
|
| CHANNEL AFTERTOUCH 208 + 12 |
Not implemented |
No |
| PITCH BEND 224 + 12 |
Not implemented |
No |
| SYSEX |
Not implemented |
No
|
| 241 and higher |
Not implemented no real time msg's |
No |
-
|
temple block
inventary nr.
|
number in our selection |
midi mapping |
origin |
pitch centroid |
| A |
1 |
60 |
Taiwan |
70.8 |
| B |
2 |
61 |
Taiwan |
74 |
| C |
3 |
62 |
China |
76 |
| D |
4 |
63 |
Taiwan |
78 |
| E |
5 |
64 |
China |
81 |
| F |
6 |
65 |
China |
82 |
| a 9 |
7 |
72 |
China |
94 |
| b 10 |
8 |
73 |
China |
97 |
| c 11 |
9 |
74 |
China |
99 |
| d 12 |
10 |
75 |
China |
100 |
| e 13 |
11 |
76 |
China |
103.5 |
| f 14 |
12 |
77 |
China |
106 |
Compositions for the <Temblo> Robot:
Technical data and instrument passport:
name: <Temblo>
- Sizes:
heigth 690mm, square ground surface: 650 x 650 mm, Flightcase: 665 x 665
x 720
- netto weight: 22kg
- electrical connection: 3-prong connector,
230V ac.
- data connection: MIDI input, 5 MIDI THRU's
- Insurance value:(production cost, materials,
including flight case): 11.500 Euro.
Nederlands:
Een nederlandse beschrijvende tekst is voorlopig nog niet beschikbaar.
Het bouwdagboek daareentegen is -met het oog op de betrokken studenten-
integraal in het nederlands geschreven.
Dagboek voor de bouw van <Temblo>:
- 25.10.2012: Eerste werkbijeenkomst met de studenten instrumentenbouw. Bespreking
van het projekt. Eerste inventarisering van de te verwachten problemen.
- 28.10.2012: Selektie van temple blocks uit onze kollektie. Zeker een twaalftal
ervan blijken bruikbaar.
- 08.11.2012: Tweede werksessie. Inventarisatie en opmeting
van de voorhanden zijnde bruikbare temple blocks bij Logos.
-
|
temple block
inventaris nr.
|
nummer in definitieve selektie |
gewicht in g |
opp. spleet |
inhoud holte |
toonhoogte centroid |
| 1 |
|
340 |
|
300cc |
73.5 |
| 2 |
1 |
550 |
|
468cc |
74 |
| 3 |
|
420 |
|
320cc |
80.5 |
| 4 |
|
412 |
|
|
80 |
| 5 |
|
316 |
|
|
81 |
| 6 |
|
140 |
|
|
85 |
| 7 |
|
166 |
|
|
86 |
| 8 |
|
301 |
|
|
88 |
| 9 |
|
83 |
|
|
94 |
| 10 |
|
43 |
|
|
97 |
| 11 |
|
27 |
|
|
99 |
| 12 |
|
57 |
|
|
100 |
| 13 |
|
42 |
|
|
103.5 |
| 14 |
|
32 |
|
|
106 |
| 15 |
|
181 |
|
|
111 |
De inhoud werd gemeten door de temple blocks te vullen met fijn zand, en dat
volume dan te meten met een meetbeker.  Ontwerpschetsen
gemaakt, uitgaande van een tetraedrische hoofdstruktuur. Rapportering resultaten
van de opdracht tot het achterhalen van de samenstelling van de rode chinese
lak en de gepaste wijze van restauratie.
Ontwerpschetsen
gemaakt, uitgaande van een tetraedrische hoofdstruktuur. Rapportering resultaten
van de opdracht tot het achterhalen van de samenstelling van de rode chinese
lak en de gepaste wijze van restauratie.
- 22.11.2012: Derde kollektieve werksessie. Uitzagen chassisdelen met Thomas
Strypsteen. Maatschets voor de gelijkzijdig driehoekige drager uit plat inox,
warmgewalst AISI 316 30x10:
 Deze drager houdt de onderste zes temple blocks. De opstanden kunnen worden
gemaakt uit 12 mm rond inox staafmateriaal.
Deze drager houdt de onderste zes temple blocks. De opstanden kunnen worden
gemaakt uit 12 mm rond inox staafmateriaal.
- 23.11.2012: Inkoop zwenkwielen. Bestelling inox profielen bij Demar-Lux.
- 24.11.2012: Design of the PIC circuitry:
 This is basically a copy of the design for <Casta Due>. Resolution for
the pulses in this design is limited to 19.2us. This may be not enough taking
into account the high supply voltage we want to use here.
This is basically a copy of the design for <Casta Due>. Resolution for
the pulses in this design is limited to 19.2us. This may be not enough taking
into account the high supply voltage we want to use here.
- 04.12.2012: Extra templeblocks ordered from Sons & Rhythmes
- 06.12.2012: Vierde kollektieve werksessie met de studenten. De hoogte van
de tetraeder, gemeten vanaf de gelijkzijdige driehoek gevormd door de onderste
etage (zijde=455mm) zal 372mm zijn. De tweede etage (zijde=150mm) ligt dan
op 122.5 mm van de top (hoogtelijn). Uitzagen gelijkzijdige driehoek voor
de bovenste etage. [memo: formule voor de hoogte van een tetraeder, gegeven
de zijde: h= z * SQR(2)/SQR(3), of in afgeronde getallen h = 0.8165 * z ].
- 08.12.2012: Start design and construction of the beaters for the small templeblocks.
 Voor de bovenste zes templeblocks gebruiken we dezelfde elektromagneten zoals
eerder toegepast in <Spiro> en <Toypi>. Wat het materiaal voor
het kloppertje betreft moeten we nog uitzoeken wat het beste resultaat geeft:
bakeliet M3 kogelkoppen (zoals in Spiro) of houten kogels zoals gebruikt in
Toypi. Hier een foto van het eerste prototype van de beugel, vervolgens een
beugel met gemonteerde elektromagneet:
Voor de bovenste zes templeblocks gebruiken we dezelfde elektromagneten zoals
eerder toegepast in <Spiro> en <Toypi>. Wat het materiaal voor
het kloppertje betreft moeten we nog uitzoeken wat het beste resultaat geeft:
bakeliet M3 kogelkoppen (zoals in Spiro) of houten kogels zoals gebruikt in
Toypi. Hier een foto van het eerste prototype van de beugel, vervolgens een
beugel met gemonteerde elektromagneet: 

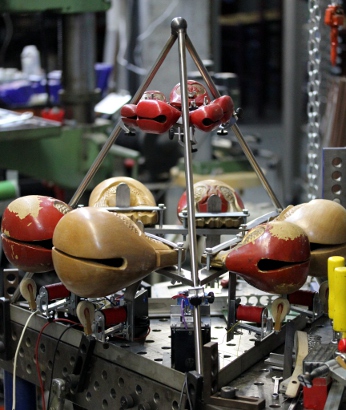
- 09.12.2012: Konstruktie van een test elektromagneet voorzien van een vilten
hamerkop uit een piano:
 Dit zou bruikbaar kunnen zijn voor de grote templeblocks. De hier gebruikte
elektromagneet is een traktuurmagneet zoals geleverd door de firma August
Laukhuff Gmbh. De nominale bedrijfsspanning is 12-14V. De bovenste etage,
in een testopstelling kan eruit zien zoals op volgende foto:
Dit zou bruikbaar kunnen zijn voor de grote templeblocks. De hier gebruikte
elektromagneet is een traktuurmagneet zoals geleverd door de firma August
Laukhuff Gmbh. De nominale bedrijfsspanning is 12-14V. De bovenste etage,
in een testopstelling kan eruit zien zoals op volgende foto:  De uit inox 30x10 warmgewalst plat vervaardigde gelijkzijdige driehoek heeft
een zijde van 150 mm, de kleinst mogelijke maatvoering voor de plaatsing van
de zes kleinste templeblocks.
De uit inox 30x10 warmgewalst plat vervaardigde gelijkzijdige driehoek heeft
een zijde van 150 mm, de kleinst mogelijke maatvoering voor de plaatsing van
de zes kleinste templeblocks.
- 11.12.2012: Levering van de bestelde inox profielen en materialen door Demar-Lux.
- 15.12.2012: Konstruktie van de analoge voedingsmodule voor de elektromagneten.
Hiervoor gebruiken we een Erea 50VA transformator, 220V/42V. Dit levert, na
gelijkrichting en afvlakking een DC spanning op van 70V, onbelast. Deze voedingseenheid
werd gemonteerd op een inox plaat van 150x100mm. De bruggelijkrichter komt
bovenop de transformator met een bevestigingsplaatje.
- 16.12.2012: Alternatieve schakeling voor de puls opwekking ontworpen en
uitgetekend. Hierbij maken we gebruik van 4 driedubbele 16-bit timer chips,
gestuurd door een PIC:
 In dit ontwerp is de timing resolutie 1us. De maximale duur van een puls is
dan 65ms. Hoewel heel wat ingewikkelder dan de schakeling met een enkele PIC
mikrokontroller, heeft deze schakeling het voordeel van een veel grotere glitch-vrijheid
doordat de interrupts gegenereerd door de timers in de PIC en door de inkomende
midi-data stroom geen pulsduur variaties meer kunnen veroorzaken. Het is echter
de vraag of we dit op een eurokaart print kunnen opgebouwd krijgen. Een gelijkaardig
opzet pasten we eerder al toe in robots zoals,<Vibi>,
<Tubi> en <Rotomoton>.
In dit ontwerp is de timing resolutie 1us. De maximale duur van een puls is
dan 65ms. Hoewel heel wat ingewikkelder dan de schakeling met een enkele PIC
mikrokontroller, heeft deze schakeling het voordeel van een veel grotere glitch-vrijheid
doordat de interrupts gegenereerd door de timers in de PIC en door de inkomende
midi-data stroom geen pulsduur variaties meer kunnen veroorzaken. Het is echter
de vraag of we dit op een eurokaart print kunnen opgebouwd krijgen. Een gelijkaardig
opzet pasten we eerder al toe in robots zoals,<Vibi>,
<Tubi> en <Rotomoton>.
- 18.12.2012: Eerste tentatieve montage van twee grote temple blocks met inox
beugel op de draagstaaf. De Taiwanese temple blocks zullen wellicht iets moeten
bijgevijld worden, gezien de assymetrie van hun handvat. Voeding met stabilisatie
voor de 12V verbruikers in Temblo in elkaar gezet en getest. We pasten een
low drop LT1084-12 regulator toe in een TO220 behuizing.
- 17.01.2012: Uitzagen gelijkzijdige driehoek uit 30x30x3 inox L-profiel.
Dit wordt de basisstruktuur die ook alle elektronika moet gaan dragen. Afmetingen
van de zijde: 600mm.
- 19.01.2013: Boren montagegaten in onderste L-profielen waarop de elektronika
komt te zitten. Voorziening voor 3 rode LED spotjes, netschakelaar, IEC netspanningsingang,
midi-hub board met gaten voor 6 DIN pluggen.


- 20.01.2013: Assemblage top tetraeder konstruktie. Op de ronde ribben op
hun juiste plaats te klemmen ontwierpen we een werktuig:
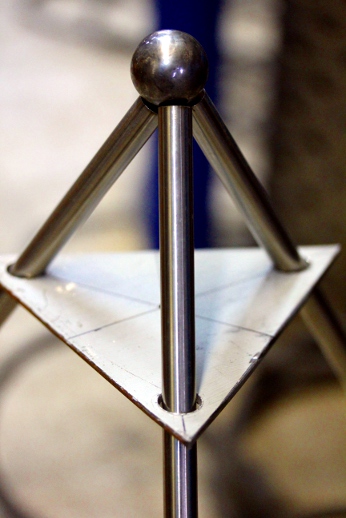 Natuurlijk mag na positionering slechts 1 van de ribben op de bovenste kogel
worden vastgelast, zoniet zou de klemplaat immers niet meer te verwijderen
zijn. De ribben zijn 600mm lang gemaakt uit geslepen as, inox, diameter 12mm.
De kogel is gewoon gehard chroomstaal, aangezien we geen roestvaste kogels
in stock hadden.
Natuurlijk mag na positionering slechts 1 van de ribben op de bovenste kogel
worden vastgelast, zoniet zou de klemplaat immers niet meer te verwijderen
zijn. De ribben zijn 600mm lang gemaakt uit geslepen as, inox, diameter 12mm.
De kogel is gewoon gehard chroomstaal, aangezien we geen roestvaste kogels
in stock hadden. Gezien van bovenuit:
Gezien van bovenuit: 
- 21.01.2013: Ontwerp houders voor de onderste zes elektromagneten. Sleuven
voor de M4 boutjes lijken aangewezen gezien die de beste mogelijkheden tot
vertikale afregeling kunnen bieden.
- 24.01.2013: Werksessie met de studenten. Konstruktie van de hamerkoppen.
 Inboren
gaten 4.7mm diameter in de gerecykleerde pianohamers waarin de M5 schroefdraadeinden
worden gedraaid en vastgekleefd met epoxy hars. Afvijlen van de schroefdraadstangen
voor de hamerkoppen:
Inboren
gaten 4.7mm diameter in de gerecykleerde pianohamers waarin de M5 schroefdraadeinden
worden gedraaid en vastgekleefd met epoxy hars. Afvijlen van de schroefdraadstangen
voor de hamerkoppen:  Lasinstruktie
TIG. De ten gerieve van de studenten aangekochte gehoorbeschermers zijn geleverd
en goed bevonden. We hebben wel nog een tekort aan veilige lasmaskers.
Lasinstruktie
TIG. De ten gerieve van de studenten aangekochte gehoorbeschermers zijn geleverd
en goed bevonden. We hebben wel nog een tekort aan veilige lasmaskers.
- 31.01.2013: Lassessie met de studenten: 10 mm dikke driehoek drager voor
de onderste 6 temple blocks ineengelast. Laswerk onder begeleiding uitgevoerd
door de studenten. Uitzagen inox stukken (plat, geslit 30x3, AISI 306) voor
de elektromagneethouders voor de onderste temple blocks.
- 01.02.2013: Test montage: de onderste driehoek blijkt te groot, want de
elektromagneten raken het onderste verbindingsprofiel... Oplossing: sleuven,
breedte 12mm uitgezaagd en gevijld in de 10mm dikke drager voor de onderste
temple blocks. Hierdoor moeten enkele gaten (voor blok C en A) opnieuw worden
geboord want de bevestigingsbouten passen niet onder de opstaande tetraederribben.
Eerste test van de aanslag met een gemonteerde elektromagneet en templeblok
E. De voorziene voeding werd gebruikt en om een puls van ca. 1ms te verkrijgen,
namen we gewoon een eindje draad in de hand, zwaaiden we dit aan 1m/s langs
de soldeerlip van het kontakt. Aangezien het draadje aan het uiteinde voor
slechts ca. 1mm van isolatie werd ontdaan, kan de puls niet langer zijn dan
1ms. Het resultaat is bevredigend en indien de slag nog te zacht zou zijn
kunnen we steeds nog beroep doen op de ingreep eerder toegepast in <Vacca>,
met name het verharden van de vilten hamers met een dun vloeibare vernissoort.
- 14.02.2013: Sleuven uitgeslepen voor alle zes onderste temple blocks.
- 15.02.2013: Plooien inox stukken met sleuven op positie voor de juiste aanslag.
Dit plooiwerk kan gewoon in de bankschroef worden uitgevoerd. Positioneren
en vastlassen van de eerste drie sleufgeleiders.
 Op de foto: vastklemmen van de beugel vooraleer tot het lassen over te gaan.
Het stuk rechthoekig buisprofiel dient alleen als tijdelijke steun. Het markeerstreepje
voor de juiste hoogteinstelling is op de foto goed zichtbaar. Test positionering
na het aanlassen:
Op de foto: vastklemmen van de beugel vooraleer tot het lassen over te gaan.
Het stuk rechthoekig buisprofiel dient alleen als tijdelijke steun. Het markeerstreepje
voor de juiste hoogteinstelling is op de foto goed zichtbaar. Test positionering
na het aanlassen:  Het vrije trajekt van de hamer moet ongeveer 10mm zijn. Er dient op te worden
gelet dat de hamer (die een baan om een cirkelsegment beschrijft) bij de aanslag
een loodrechte stand heeft tegenover de aangeslagen blok.
Het vrije trajekt van de hamer moet ongeveer 10mm zijn. Er dient op te worden
gelet dat de hamer (die een baan om een cirkelsegment beschrijft) bij de aanslag
een loodrechte stand heeft tegenover de aangeslagen blok.
- 16.02.2013: Alle zes sleufstukken gebogen, gemonteerd en aangelast. Test
assemblage van het geheel met positionering van de voedingen:

 Inklemmen bovendeel
onder 60 graden op de lastafel. De bovenste zes kleine templeblocks zijn hier
nog niet voorzien van hamertjes. De opstaande tetraederribben mogen nog niet
op het onderstel worden vastgelast, want eerst moeten de draagribben en profielen
voor de te monteren elektronika daarop nog worden ingelast en geboord.
Inklemmen bovendeel
onder 60 graden op de lastafel. De bovenste zes kleine templeblocks zijn hier
nog niet voorzien van hamertjes. De opstaande tetraederribben mogen nog niet
op het onderstel worden vastgelast, want eerst moeten de draagribben en profielen
voor de te monteren elektronika daarop nog worden ingelast en geboord.
- 17.02.2013: Inlassen draagstrukturen voor de montage van de voedingen en
de microprocessor boards op het basischassis. Slijpen onderstel.
 .
Boren gaten voor de drie zwenkwielen (12mm gaten), op 33 mm van de hoeken.
Montage voedingen op onderstel met M4 boutjes. Montage schakelaar. Uitlijnen
tetraeder konstruktie. Test op de bereikbaarheid van de af te regelen en te
demonteren onderdelen. Alleen de montage van de aan/uit schakelaar bleek voor
wat problemen te zorgen, dit vanwege de opstanden van de 12V voedingseenheid.
Vastlassen tetraederribben op onderstel.
.
Boren gaten voor de drie zwenkwielen (12mm gaten), op 33 mm van de hoeken.
Montage voedingen op onderstel met M4 boutjes. Montage schakelaar. Uitlijnen
tetraeder konstruktie. Test op de bereikbaarheid van de af te regelen en te
demonteren onderdelen. Alleen de montage van de aan/uit schakelaar bleek voor
wat problemen te zorgen, dit vanwege de opstanden van de 12V voedingseenheid.
Vastlassen tetraederribben op onderstel. Oplassen dragers voor het naar onder gerichte blauwe LED licht. Daar bovenop
kan een rode kap komen met LED zwaaillicht of rondom-licht. Zoals de konstruktie
nu is, kunnen de zwenkwielen zonder tussenbuisjes op het onderstel vastgeschroefd
worden. De eindafmetingen van de robot liggen nu definitief vast. De bedrading
van de voedingen kan van start gaan.
Oplassen dragers voor het naar onder gerichte blauwe LED licht. Daar bovenop
kan een rode kap komen met LED zwaaillicht of rondom-licht. Zoals de konstruktie
nu is, kunnen de zwenkwielen zonder tussenbuisjes op het onderstel vastgeschroefd
worden. De eindafmetingen van de robot liggen nu definitief vast. De bedrading
van de voedingen kan van start gaan.
- 18.02.2013: Redaktie van test besturingskode in onze GMT omgeving. Bronkode
in \b\pb\gmt\robots\temblo\temblo.inc. Inkoop inox bouten M6 x 50 en M6 x
40 (MEA). Testmontage van de drie zwenkwielen middels M12 x 40 bouten. Wieljes
met rode polyurethaan banden zouden mooier staan... Poging tot restoratie
van de chinese lak met Loctite 7400. Het kleurverschil is storend...
- 19.02.2013: Bestukking midi-hub board, een ontwerp gemaakt en uitgevoerd
in november 2006. Dit is de laatste hub print die we nog in voorraad hebben...
Op het prototyping veld komt het vermogensrelais te staan, aangestuurd door
midi controller #66. Dit relais schakelt de 70V dc spanning voor de spoelen
aan of uit. De bestukking volgt in grote lijnen die voor <Spiro>. Alle
power MOSFET's zijn IRL640. De beschermingsdiodes lieten we achterwege aangezien
hier geen induktieve lasten geschakeld worden.
 Eerste
versie van de firmware voor het midi-hub board (PIC 18F2525 processor) geschreven
in de Proton kompiler. De source
kode is hier beschikbaar. Getest en van grote bugs ontdaan.
Eerste
versie van de firmware voor het midi-hub board (PIC 18F2525 processor) geschreven
in de Proton kompiler. De source
kode is hier beschikbaar. Getest en van grote bugs ontdaan.
- 20.02.2013: Bestukking pulse-board. Dit boardje pasten we eerder toe in
robots zoals <Casta Due>, <Casta>, <Psch>. Nieuwe firmware
geschreven in de Proton kompiler. De source
kode is eveneens hier beschikbaar. Start bedrading van de diverse komponenten,
voedingen en boards. Er worden slechts 12 outputs gebruikt. De PIC poorten
RB7, RB6, RB5,RB4 laten we vrij, wat makkelijker is bij het debuggen aangezien
deze pinnen voor de programmer worden gebruikt. Hier een foto van het bestukte
board:
 Testkode
verder uitgewerkt en toegevoegd in de betreffende module van GMT. Een meetsessie
gericht op de betrouwbaarheid van de pulsduren (jitter en latency) met de
Tektronix oscilloskoop is nu noodzakelijk. Variaties in de pulsduur kunnen
nu in hoofdzaak ontstaan door de high priority interrupts gegenereerd door
binnenkomende midi kommandos.
Testkode
verder uitgewerkt en toegevoegd in de betreffende module van GMT. Een meetsessie
gericht op de betrouwbaarheid van de pulsduren (jitter en latency) met de
Tektronix oscilloskoop is nu noodzakelijk. Variaties in de pulsduur kunnen
nu in hoofdzaak ontstaan door de high priority interrupts gegenereerd door
binnenkomende midi kommandos.
- 21.02.2013: Pulse schakeling aan de Tektronix TPS2024 oscilloskoop (uitgeleend
uit het klanklaboratorium van het konservatorium, aangezien onze eigenste
Fluke de geest heeft gegeven) gehangen voor metingen. De onzekerheid over
de bereikbare pulsduren beloopt 40us. Dat is dus de grens van de bereikbare
precizie. Deze meting werd gedaan met een hoge midi flow zodat we een realistische
test verkrijgen. Met deze V1.0 firmware krijgen we volgende pulsduren bij
uitgestuurde velo parameter:
-
| velo |
pulsduur |
| 1 |
40us |
| 2 |
40us |
| 3 |
80us |
| 4 |
80 / 121us |
| 5 |
121us |
| 6 |
160us |
| 10 |
240us |
| 20 |
480us |
| 40 |
1.00ms |
| 80 |
2.00ms |
| 127 |
3.240ms |
Of deze scaling ook voldoet bij de gebruikte elektromagneten moet nu nog worden
uitgezocht op de robot zelf. Ook bij 24 aanslagen per sekonde met velo=127,
blijven we binnen de toelaatbare grenzen wat betreft de duty cycle van de
elektromagneten. De eerste tests met de Laukhuff elektromagneten wijzen uit
dat de minimale pulsduur 1.6ms moet zijn. Wanneer we in de firmware bij deze
minimum waarde de dubbele waarde van de velo parameter optellen, verkrijgen
we een bereik van 1.6ms tot 8ms. Binnen de grenzen van de toelaatbare duty
cycle (5%) betekent dit dat voor deze hoogste velo waarden de repetitiesnelheid
beperkt zou moet worden tot 6 aanslagen per sekonde. De precizie van de zo
verkregen pulsduren is nu beter dan 2%, wat alleszins ver beneden het waarneembare
valt. Een bedenking: wanneer gebruikers nu note-on kommandos sturen met hoge
velo waarden en een heel hoge repetitiesnelheid, is overschrijding van de
toelaatbare duty cycle niet denkbeeldig. Het kan overwogen worden om na elke
puls een dood-tijd (proportioneel aan de velo parameter) in de firmware in
te voeren. De inherente dood-tijd is nu bepaald door de beperkingen van de
midi baudrate en beloopt zonder verdere ingrepen in de firmware minimaal ca.
1ms. De mechanika van de elektromagneten en de hamers beperkt in elk geval
de muzikaal zinnig haalbare repetitiesnelheid tot 20 a 30Hz. Dat komt neer
op een 'dood' tijd van ca.33ms. Het gevaar is niet erg reeel bij gebruikers
die gebruik maken van sequencer software, maar wanneer algoritmische of kode
gestuurde toepassingen (bvb. gebruikers van PD of Max) op de robots worden
losgelaten, kunnen de grenzen gemakkelijk worden overschreden. Een alternatief
zou er natuurlijk in kunnen bestaan thermische zekeringen op de spoelen te
monteren. Die zorgen voor een natuurlijke integratie.
- Onderste driehoek met temple blocks definitief gepositioneerd en vastgelast
op de tetraederribben.
- 22.02.2013: De onderste zes templeblocks kunnen reeds goed spelen. Gedemonstreerd
voor Kristof Lauwers, Sebastian Bradt, Xavier Verhelst en Moniek Darge. Floesj
was niet erg onder de indruk. Mechanische demping van het geluid bij het terugvallen
van de hamers moet worden aangebracht. Ontwerp temple blok bevestigingen bovenste
etage en uitwerken schetsen voor de montage van de hamertjes. Levering van
de rode zwenkwielen door Kaiser+Kraft. De asgaten moeten worden uitgeboord
tot 12mm. Rode wielen gemonteerd en goed bevonden.
- 23.02.2013: Test assemblage en montage van het grootste der kleine blokjes
(gemarkeerd 'A' op de drager driehoek). We gebruiken precies dezelfde houten
kogeltjes als eerder ontworpen voor <Toypi>.
Boren van alle bevestigingsgaten in de bovenste driehoek.
 Vastkleven
terugslag dempingsviltjes. Bevestiging klopperjes op de ankers van de elektromagneten.
Vastkleven
terugslag dempingsviltjes. Bevestiging klopperjes op de ankers van de elektromagneten.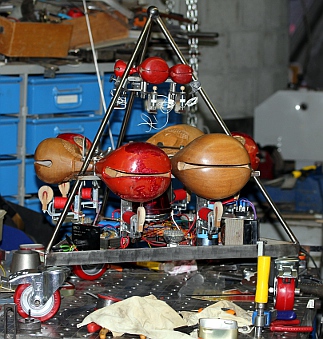
- 24.02.2013: Montage van alle resterende kleine temple blocks. Afwerking
van de elektromagneethouders. Maken van de precizie afstandsbussen met gat
voor M6 bouten. Test inpassen in de hoofdtetraederstruktuur. Vastlassen van
de bovenste driehoek in de hoofdtetraeder. Gladschuren van de lasnaadjes.
Opnieuw monteren van de temple blocks en de elektromagneten. De volgorde van
de handelingen moet hierbij nauwgezet in het oog worden gehouden, vanwege
de erg krappe ruimte tussen bepaalde montageonderdelen. Bedrading kleine temple
blocks en aansluiting op de Weidmueller konnector op het pulse board.
- Tests met de kleine temple block's uitgevoerd: De minimale pulsbreedte (voor
pp) bedraagt 500us. In de huidige firmware kunnen we dus een scaling toepassen
van 500us tot 3.75 ms. De duty cycle blijft daarmee veilig. Temblo kan voor
de eerste keer volledig spelen, hoewel de mechanische afregeling nog moet
gebeuren.
- Overwogen kan worden om midi controllers te implementeren voor de minimale
velo-offset van de onderste en de bovenste kloppers evenals voor het regelbereik.
Dit kan een alternatief zijn voor het gebruik van via sysex kommandos oplaadbare
lookup tables.
 Eerste fotoshoot met <Temblo>. Foto's vrijgegeven via Facebook.
Eerste fotoshoot met <Temblo>. Foto's vrijgegeven via Facebook.
- 25.02.2013: Temblo tests en evaluaties door Kristof Lauwers. Implementatie
van <Temblo> in de GMT file player. Ontwerp voor de bovenste lampjes.
- 26.02.2013: Montage en bedrading zes lampjes op de bovenste etage. We gebruiken
gewone E10 socket 12V/ 185mA gloeidraadlampjes hiervoor. De sockets worden
vastgezet met M5 boutjes. Midi dokumentatie aangepast aan de juiste mapping
van de lampjes. Testkode toegevoegd in de GMT software. Afmetingen voor de
te maken transportkist vastgelegd.
- 27.02.2013: Konstruktie van een extra feature: een gemotoriseerde kleine
ratel..., aangestuurd door en Philips 24V DC motor met vertragingskast. Deze
kan worden gemapt op midi noot 69 en aangestuurd met PWM zodat het toerental
regelbaar wordt. Firmware voor de midi-hub PIC aangepast om PWM sturing van
de motor mogelijk te maken.
 Om motorgeluid te vermijden monteerden we de motor in een Sikla buisbeugel
voorzien van een neopreen inleg. Deze beugel wordt op de 3mm dikke aluminium
basisplaat vastgezet met een verzonken M8 x 10 bout. Het onbelaste stroomverbruik
is 20mA en deze stroom loopt op tot maximaal 40mA wanneer de motor wordt belast.
Om motorgeluid te vermijden monteerden we de motor in een Sikla buisbeugel
voorzien van een neopreen inleg. Deze beugel wordt op de 3mm dikke aluminium
basisplaat vastgezet met een verzonken M8 x 10 bout. Het onbelaste stroomverbruik
is 20mA en deze stroom loopt op tot maximaal 40mA wanneer de motor wordt belast.
- 28.02.2013: Definitieve montage van de ratel, bovenop de 24V voedingsmodule.
Implementatie in GMT en firmware in de hub PIC gezet. De motor-snelheid is
wat te laag en we kunnen overwegen de motor te voeden uit de 70V voeding in
de pulsbreedte te beperken tot ca. 35%, overeenkomstig de nominale motorspanning
van 24V. Gezien het geringe stroomverbruik kan dat geen problemen opleveren
met de stabiliteit van de 70V voeding zelf. Fluktuaties van deze spanning
hebben immers ernstige gevolgen voor de betrouwbaarheid van de aanslagkracht
van de elektromagneten.
- 04.03.2013: Ratchet motor nu gevoed vanuit de 70V voeding. Hiervoor moeten
wel de diodes op het midihub PC-board worden weggeknipt, zoniet immers komt
via deze diodes 70V te staan op de voeding van de lampjes... We schakelden
een 700 Ohm weerstand (10W, draadgewikkeld) in serie met de motor.
- 05.03.2013: Konstruktie van de flight case voor het transport van <Temblo>.
Ribstruktuur uit gelast inox profiel 30x30x3. Plaatvulling met MDM plaat,
vastgelijmd met Parabond kit. De Temblo robot kan zijwaarts in de kist rijden,
waarna het zijdeksel wordt vastgeschroefd met 4 M10 bouten. Bodemplaat vastgekit.
- 06.03.2013: Verder werk aan de flight case voor Temblo. Bovenplaat in MDM
vastgekit. Achterpaneel uitgezaagd.
- 09.03.2013: Signeerplaatje aangebracht (hier nog scheef, maar dat wordt
gekorrigeerd...)
 In het nederlands: door de rede werd ik gebouwd...
In het nederlands: door de rede werd ik gebouwd...
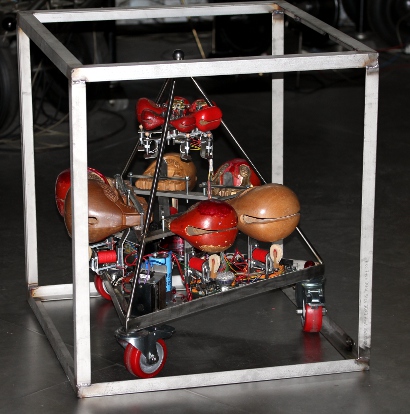
- 12.03.2013: Wachten op levering van de platen voor de afwerking van de flightcase...
Op de foto: Temblo binnen in de kubusvormige kist-in-wording:
- 13.03.2013: Panelen geleverd. Zagen en vastkleven met parabond. Aanbrengen
polstermateriaal in noppenschuim. De flightcase nadert haar voltooing...
- 19.03.2013: Flightcase afgewerkt met hulp van de studenten.
- 21.03.2013: <Temblo> speelde zijn premiere op het 'Spring' koncert
met het M&M robotorkest. Hij werd ingehuldigd door Moniek Darge. De komposities
voor <Temblo> van Sebastian Bradt, Kristof Lauwers en Godfried-Willem
Raes gingen in premiere, en ook John White's 'Photofinish Machine' werd voor
Temblo aangepast door Xavier Verhelst.
 MP3's van de temblo komposities komen binnenkort beschikbaar via deze webpagina.
MP3's van de temblo komposities komen binnenkort beschikbaar via deze webpagina.
- 20.04.2013: <Temblo> survived the trip to Glasgow very well! We expect
her back in Ghent on monday 22nd of april.
- 22.04.2013: Temblo works flawless again after the trip to Glasgow. (Unesco
Cities of Music).
- 23.04-03.06.2013: Werksessies met de kompositiestudenten Pieter Corten,
Patrick Housen, Valerie Van Roey, Henk De Bruyker rond een solokompositie
van de Temblo robot.
- 22.06.2013: <Temblo> presented and demonstrated at TEDx, Ghent Bijloke
concerthall.
- 09.10.2013: <Temblo> left this morning for its appearance on the Venice
Biennale on october 12th...
- 12.10.2013:<Temblo> presented at the Venice Biennale (Portuguese pavillion).
- 15.09.2015: One of the wooden beaters flew away. So we replaced it.
- 18.10.2015: Temblo on the road to Dok19. On return, fully checked again.
- 09.12.2015: Temblo went off to the AB in Bruxelles for a concert with Kristof
Lauwers.
- 19.04.2016: And again one of the wooden beater flew away and we couldn't
find it back. So we made six repair balls. They are wooden balls, 10mm in
diameter with a hole, ca.3mm large. In that hole we glue a 10 mm piece of
red copper wire (2.7 to 3 mm diameter) using cyane-acrylate glue. The hole
for the plungers is 1.5mm.
- 03.10/2016: <Temblo> taken to Berlin for the 'Wir sind die Roboter
Festival'. On return some M3 bolts found to got loose... A minor repair.
- 28.10.2016: <Temblo> on the road to Brugge for Iedereen Klassiek.
- 30.10.2016: Safe return from Bruges.
- 01.08.2017: Off to Liepaja (Letland) with <Temblo>, a 4000 km trip.
- 09.08.2017: On return from Liepaja, one of the wheels got loose. Fastened
again, using some Loctite thread compound.
- 22.11.2017: <Temblo> joined the party at euRobotics in Brussels. Found
o.k. on return.
- 07.11.2019: <Temblo> on the road to Tallinn (Estland).
- 02.07.2021: <Temblo> on the road for Luxemburg
- 15.07.2021: Innundations in the abbey where <Temblo> is installed...
Awaiting news.
- 19.07.2021: Pictures received from the Abbaye de Neumuenster where <Temblo>
got flooded:

 At first sight it looks like the templeblocks and their solenoids didn't get
wet. The electronics underneath are likely to be lost forever. The resolution
of the pictures is no good enough to diagnose with certainty.
At first sight it looks like the templeblocks and their solenoids didn't get
wet. The electronics underneath are likely to be lost forever. The resolution
of the pictures is no good enough to diagnose with certainty.
- 26.07.2021: <Temblo> returned from Luxemburg to our workshop. Damage
appears less than what we feared at first.
- 27.07.2021: Cleaning and repair session. After four hours of work, we fired
<Temblo> up again and found it to be in working condition again! Fortunately,
<Temblo> uses gold-plated PCB's and thus, didn't suffer from oxidation
on the boards. . We also repaired its flightcase. <Temblo> can go on
the road again.
- 14.05.2022: <Temblo> set up in Rennes (France) in an interactive installation
with our radar gesture sensing devices.
- 14.09.2023: <Temblo> on the road to the Deutsche Oper Berlin.
- 02.10.2023: <Temblo> returned from Berlin. Some bolts and nuts were
found to have loosened, but that was a minor repair.
- 23.10.2025: <Temblo> speelt mee in het mini-robot programma bij WD40
in Gent.
TODO LIJST:
- elastische montage van de onderste temple blocks
- restauratie chinees lakwerk met roodgekleurde urishiol lak
- optimalisatie firmware voor beide PIC controllers
- afwerking bedrading en aanleg kabelbundels
- indien voldoende plaats, overweging om 3 pyrodetektoren te monteren voor
automatische interaktieve bespeling.
- afregelen van de mechnieken en aandraaien/borgen van bouten en moeren.
- terugslagdempingsvilt uitproberen en indien werkzaam, blijvend monteren.
- verslag schrijven en evaluatie
Last update: 2025-10-30 by Godfried-Willem Raes
Maintenance information:
Power supply circuit: 
- Transformer 230V - 2x6V:, Farnell order nr. 116-6160, Digital Electronics
D3016, Laminated transformer.
- Transformer 230V - 12V: Halogen lamp transformer. 25VA
- Transformer 230V - 42V: Erea, 50VA
- The power relay is mounted on the midi-hub board.
Pulse driver processor board:
Alternative circuit, using programmable 16-bit hardware timers:
Midi-Hub board:
Solenoids used for the small temple blocks: Lucas Ledex type 195203-234.
Size: 0.5" x 1" . These are the essential specs, taken from the Ledex data sheet:

The operational voltage for 100% duty cycle operation is specified at 12.2V,
climbing to 39V for a 10% duty cycle. We use them with pulses ranging between
500us and 3.75 ms on a voltage of 70V. Single note repetition rate at the longest
pulselengths should be limited to 13.5 beats a second, yielding a duty cycle
of 5%. Coil resistance at 20 degrees temperature is 37 Ohms. Thus the peak current
during the stroke can be as high as 1.89 A. Acceleration can be calculated as
12.7 m/s^2
Solenoids used for the large temple blocks: August Laukhuff, kleiner
trakturmagnet. DC coil resistance: 30 Ohms. Here again, we keep the duty cycle
as low as 5% worst case. Nominal working voltage at 100% duty cycle: 12-14V.
We use them with 70V pulses ranging between 1.5 ms and 8 ms. Note that these
solenoids are always delivered with soldered-on surge supressors (VDR's). These
have to be removed in any case as they contradict the way we are using these
solenoids. The protection by the diodes on our pulse driver PC board provide
ample protection.
Ratchet motor: Philips 24V DC, geared. Model MB15, 4 mm spindle. Order
nr. 9904 120 52705. Current consumption: no load: 20mA, with load 40mA.
Lights:
- 3 Red Power LED 38 , GU5.3 socket, 1.7 W (nr. 574582, red BaseTech), 16
Lumen, radiation angle: 15-20 degrees. Designed for 12 V ac operation. (midi
note mapping 120,121,122)
- Blue bottom light: power LED QRB111 assembly, 12V / 4.6W. 57 LED's, diameter
111mm. Article nr. 550127. (Ordered from Conrad) (midi note mapping 123)
- Light under the red globe: 12V/ 5W halogen bulb, G4 socket. Osram nr.64405S
(Halostar Starlite). Life expectancy: 4000 h. (midi note mapping 126). This
light can be dimmed.(midi note 127)
- Light bulbs upwards on small templeblock triangle: 3 x 12V, 185mA, E10 fittings.
Life expectancy: 4000h. (midi mapping 125)
- Light bulbs downwards on small templeblocks triangle: 3 x 12V , 185mA, E10
fittings. Life expectancy: 4000h (midi mapping 124)
Wheels:
- red wheels: ordered from Kaiser+Kraft, order nr. 760 542-84. Diameter 100mm,
wielbreedte 40mm. Naaf/asgat: 40/12mm. Rood polyurethaan loopvlak Price: 26,30
Euro + VAT a piece.
- wheel chassis: ordered from Kaiser+Kraft, order nr. 704 698-84. These come
with ugly polyethylene wheels that we removed. Also the horizontal bolt is
M8 and has to be drilled out to accomodate an M12 bolt. Horizontal wheelcircle:
70mm diameter. Price 22.25 Euro + VAT a piece.
