|
Logos Foundation
Flanders Musical Robotics
|
|
<Ubu>
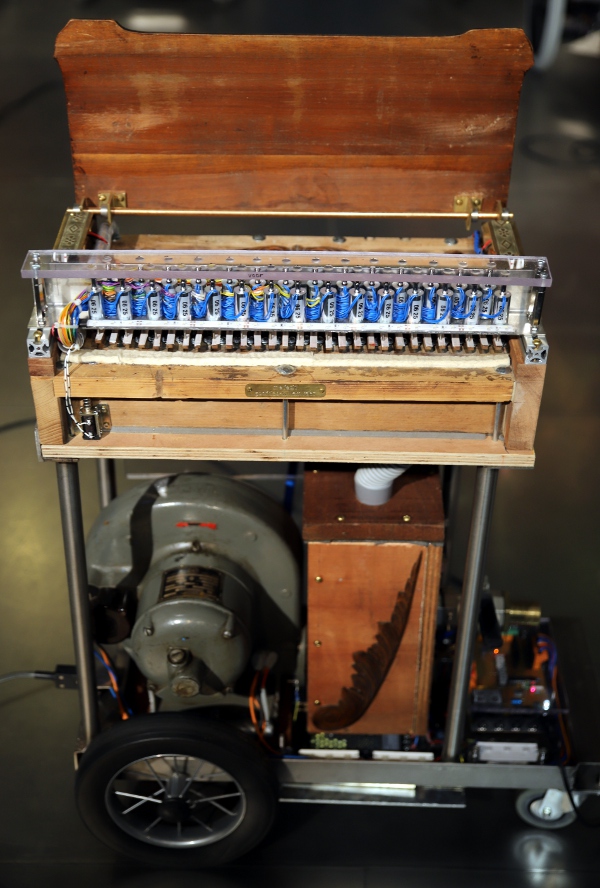
automated pressure wind bass reed organ with melodica attachment in a
mother and child configuration
Godfried-Willem RAES
2025
Version 1.0
last update: 30 November, 2025
|
<Ubu>
Helemaal bij het begin van de 21e eeuw staken twee fans van ons werk in het
atelier voor instrumentenbouw een wrak van wat ooit een harmonium moet zijn
geweest binnen. Slechts de houten struktuur waarop de doorslaande tongen vastgevezen
zitten was overgebleven... Jarenlang lag het wrak zowat te verstoffen in ons
atelier tot we ons weer eens bogen over de problemen met <Bako>. Deze
robot werkt eigenlijk naar behoren, maar blijkt toch behept met een intrinsieke
karaktereigenschap die de eenvoudige toepasbaarheid in orchestraties voor het
robotorkest bemoeilijken: de op en neergaande balg heeft voor gevolg dat wanneer
diens bewegingsrichting omkeert, de luchtdruk ook eventjes wegvalt met een onderbreking
van de klinkende toon voor gevolg. Een probleem dat bij zulk ontwerp principieel
onoplosbaar is. Het harmoniumwrak dat we hadden is uitgerust met doorslaande
tongen die in het 16-voet register beginnen bij midi noot 24. Dat kwam alvast
aardig in de buurt van een alternatief voor <Bako>. Een tweede element
dat een rol speelde in de ontwikkeling van de ideeen rond een mogelijke <Ubu>
robot was het lelijke kleine eendje van het robotorkest, met name <Melauton>,
een automatische melodica die door gebrek aan middelen nooit van een dure maar
stil werkende radiaalcompressor kon worden voorzien. (Laten we niet vergeten
dat onze werking sinds 2017 grondig verstoord wordt door de schrapping van onze
strukturele subsidiering, iets waarvoor alleen Piet Van Bockstal, Francis Maes
en Frederic Styns verantwoordelijk kunnen worden gesteld). Op de lokale rommelmarkt
in Gent kochten we voor een prikje in 2022 een erg bruikbare radiaalkompressor
van Hollands fabrikaat (EMJ, Utrecht) en die zou een geschikte windvoorziening
kunnen worden voor zowel het harmonium als de melodica. We vermoeden dat de
compressor afkomstig moet zijn geweest uit het atelier van Oscar Grymonprez,
een Gentse bouwer van orchestrions... Dit bracht ons op het idee, het projekt
als een moeder-met-kind ontwerp uit te werken. Van het harmonium gebruiken we
dan alleen het laag register (noten 24 tot 64) , terwijl de sopraan gevormd
wordt door de melodica ( 60 tot 84 in midi noten).
Uit een grondige analyse van het toch wat verstoft geraakte harmoniumwrak, blijkt
het te gaan om een drukwindharmonium. Er zijn twee rijen tongen, een voor een
8-voet register en een tweede voor een 16-voet. De tongen zijn voor beide registers
identiek en vertonen geen klankkleurverschil. De tooncancellen blijken uitgevoerd
als Helmholtz resonatoren wat erop wijst dat het ooit een degelijk professioneel
gebouwd instrument moet zijn geweest.
Voor de automatisering gebruikten we eenzelfde type cylindrische elektromagneten
als eerder gebruikt voor <Sper>, een spinet. Om bijgeluiden bij het loslaten
van de toets zoveel mogelijk te vermijden, pasten we ook hier het ontwerp van
een pulse-hold schakeling met soft release toe:  Hoewel de toepassing van velocity sturing hier op zich weinig muzikale zin heeft
-een harmonium is nu eenmaal niet aanslaggevoelig en bovendien is de klankopbouw,
zeker in de bas, sowieso eerder aan de luie kant- pasten we toch een schakeling
toe waarbij velocity is geimplementeerd. Dit laat ons toe de ideale aanslag
in de firmware vast te leggen zodat de gebruiker van die kontroleparameter verlost
kan worden. Deze techniek pasten we eerder al met sukses toe in <Cemba>
en <Sper>.
Hoewel de toepassing van velocity sturing hier op zich weinig muzikale zin heeft
-een harmonium is nu eenmaal niet aanslaggevoelig en bovendien is de klankopbouw,
zeker in de bas, sowieso eerder aan de luie kant- pasten we toch een schakeling
toe waarbij velocity is geimplementeerd. Dit laat ons toe de ideale aanslag
in de firmware vast te leggen zodat de gebruiker van die kontroleparameter verlost
kan worden. Deze techniek pasten we eerder al met sukses toe in <Cemba>
en <Sper>.
Eens afgewerkt, blijkt <Ubu> voor gebruikers zeker niet de meest eenvoudig
toe te passen automaat. Dat heeft alles te maken met het wat moeilijke karakter
van de windbesturing. Om die eenvoudiger te maken, zou het nodig zijn om vooruit
te kunnen kijken in de muziek. Het opzet om real-time inzetbare robots te bouwen,
sluit dit evenwel uit.
Midi implementation and mapping:
The midi channel this robot listens to is 1. Athough velocity is implemented,
by default an internal look-up table is used replacing any value different than
one the user sends. If users want to override this default behaviour, users
have to send controller #80. <Ubu> allways plays in octaves in the range
24 to 52. If range extention is enabled with controller #70, the notes 53 to
64 will sound the same as 41 to 52.
Special effects:
note 119: Knocking ghost, Pulse only. The force of the stroke is controlled
with the velo byte. Noteoff is not required. Fast repetition is possible.
Lights:
note 120: white light 1 on the base, frontal. On/off only. Automated.
note 121: white light 2 on the base, fronta. On/off only. Automated.
note 122: red light1 under the hub board. The velo byte steers the brightness.
The brightness can also be controlled using the keypressure command.
note 123:.red light2 under the hub board. The velo byte steers the brigthness.
The brightness can also be controlled using the keypressure command
note 124: Green light strip, dimming implemented and mapped on the velo byte.
The brightness can also be controlled using the keypressure command
note 125: white LED assembly, bass side. Automated.
note 126: bright white LED strip on the front of the Vorsetzer. Automated.
note 127: white LED assembly, trebble side. Automated.
Controllers:
#1: Wind valve, inlet control. Not yet implemented but
under consideration.
#7: Volume control - global volume and
wind pressure [advised setting:50]
#30: Global repetition speed for flashing lights. This
was dropped for the final design.
#66: Power on / off. This command also resets all controllers to their
default cold-boot values.
#67: Sets the period for the on/off switching of the motor control. Default
= 0. Possible values are 0 (default value), 1 (1 second period), 2( 500ms period,
the default), 3 (250ms period). Other values are disregarded.
#68: Windpressure automation: if value = 0 automation is ON, any other value:
automation off and wind pressure is only determined by controller #7. When automation
is active, windpressure will change according to the number of notes played
and to the pitch sounding. Low notes require up to 4 times more wind than high
notes. The automation will adapt the user set volume with controller 7, to the
wind requirement of the reeds playing. By default and on cold boot automation
is allways off.
#69: Enable or disable automation of the lights. Default value : > 0, ON.
To switch this off, send controller with value = 0. If users want to use the
lights mapped on the notes 120, 121, 125, 126, 127, they must set this controller
to 0. If not set to zero, the light automation will override any user commands
for these lights.
#70: Enable or disable the octave doubling note range 53 to 64. If this controller
is 0, the ambitus is 24 to 52. If it's >0 it becomes 24 to 64.
#71: Enable or disable auto-sleep modus for the motor. If ON (>0) the motor
will halt if no notes are played for about 30 seconds. If a 'child' is connected
on the compressor, this controller must be set to OFF. If users set it to OFF
they must set it to ON after using <Ubu>.
#80: automatic velocities (0) or user velocities (>0). By default this controller
is always zero and automatic velo optimalisation will be used.
#81: For setting the velocity substitution velocity. This controller should
only be used for code development of the PIC firmware. If set to 0, the default
subsitution value will be used.
#123: All notes off. Also switches off the lights. Sets windpressure to the
value given with controller 7. It does not switch the motor off, unless autosleep
modus in on, using controller #71.
| |
subject to changes on the request of users. |
|
Technical specifications:
- sizes: w = 650 mm, d = 360 mm, h = 760 mm
- weight: 49 kg
- power: < 180 Watt / 230 V
- tuning: A = 440 Hz
- Ambitus: midi notes 24/36 to 52/64 (harmonium) 60 to 84 (melodica attachment)
- polyphony: 29 notes
- Loudness level: 92 dB (first estimate)
- Insurance value: 8.500 Euro
Design and construction: dr.Godfried-Willem
Raes (1996-2025)
Collaborators on the construction of this robot:
- Mattias Parent
- Bert Vandekerckhove
Music composed for <Ubu>:
Godfried-Willem Raes 'Begeleiding zonder solo' (2025) ['Accompaniment, no solo']
Godfried-Willem Raes 'Ubu Roi' (2025) [with optional parts for <Tinti>
and <2Pi> or <4Pi>.
Kristof Lauwers: 'Study for Ubu' (2025)
To do:
- automate the wind inlet on the motor.
- repair leaking pads and clean reeds for notes 49 and 50
- replace all springs holding the pallets down.
- firmware debug and further refinement.
Bouwdagboek:
10.01.1996: Twee fans van ons werk in het atelier steken een wrak van wat ooit
een harmonium moet zijn geweest binnen. Slechts de houten struktuur waarop de
doorslaande tongen vastgevezen zitten was overgebleven...
12.09.2025: Analyse van het intussen toch wat verstoft geraakte harmoniumwrak:
het blijkt te gaan om een drukwindharmonium. Er zijn twee rijen rieten, een
voor een 8-voet register en een tweede voor een 16-voet. De tessituur loopt
van midi noot 36 tot 96. (C3 - C8). Voor het 16-voet register is dit dan 24
- 84. De diapason blijkt op 440 Hz te staan. De tongen zijn van uitstekende
kwaliteit...
13.09.2025: Er blijkt wat houtworm aanwezig te zijn. We behandelden dit onmiddellijk
met een houtwormbestrijdingsprodukt. Twee tongen ontbreken helaas:
14.09.2025: De tongen blijken -anders dan bij de ons vertrouwde zuigwindharmoniums-
gemonteerd op een soort Helmholtz resonatoren.  De
gepolsterde ventielen zijn gemonteerd over de uitgangen van deze resonatoren.
Dit moet de klank ongetwijfeld heel wat beter hebben gemaakt dan wat we van
dergelijke instrumenten gewend zijn.
De
gepolsterde ventielen zijn gemonteerd over de uitgangen van deze resonatoren.
Dit moet de klank ongetwijfeld heel wat beter hebben gemaakt dan wat we van
dergelijke instrumenten gewend zijn.
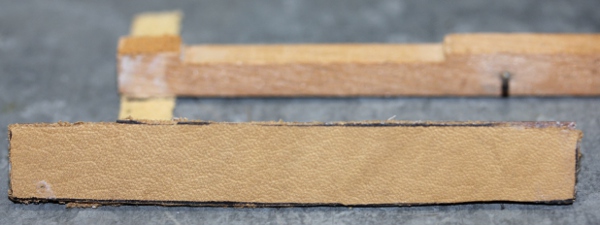
15.09.2025: tentatief begonnen met een en ander terug in speelbare staat te
brengen. Verschillende pads moesten we van nieuw leder voorzien en alle veren
dienden te worden nagezien. 
16.09.2025: Zou deze radiaalkompressor -een Hollands fabrikaat- geschikt kunnen
zijn? 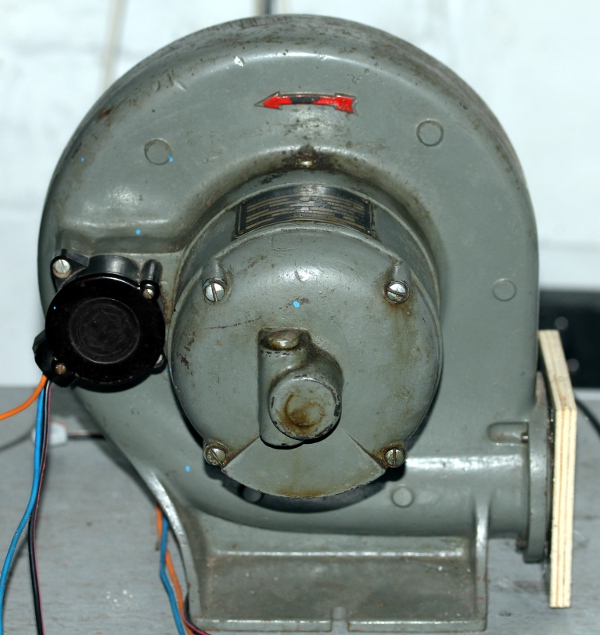
 Zoals te zien op de schildplaat, een vrij normale 2800 rpm asynchrone motor
met een vermogen van 150 W, evenwel niet gewikkeld voor driefazenstroom. De
start kondensator heeft een waarde van 2 uF en er zijn twee in serie geschakelde
wikkelingen.
Zoals te zien op de schildplaat, een vrij normale 2800 rpm asynchrone motor
met een vermogen van 150 W, evenwel niet gewikkeld voor driefazenstroom. De
start kondensator heeft een waarde van 2 uF en er zijn twee in serie geschakelde
wikkelingen. 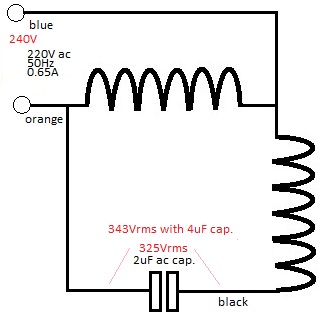 De waarde
van de kondensator is onzeker. Met 2uF start de motor wat moeizaam op maar werkt
goed. Met 4uF verloopt het starten beter maar merken we wel nogal wat verwarming
van de motor op. De formule voor de berekening van de kondensator ( C=P.r.1000
/ U.U.f) levert 3.6uF op wanneer we voor r (rendement in procent) 70 invullen
en de werkspanning op 240V nemen. P is het nominaal vemogen , U de werkspanning
en f de frekwentie. Een klassieke 3-fasige motorcontroller zullen we dus niet
kunnen gebruiken hier. We zullen veeleer de aanpak moeten overnemen van wat
we deden in bouw en ontwerp van onze <Pos> robot,
een orgeltje, al is daar nog heel wat ruimte voor verbeteringen... De fabrikant,
EMI, is een bedrijf dat werd opgericht in 1897 en zich in het interbellum ging
specialiseren in ventilatoren. Toen was het gevestigd in Zaltbommel. In 1963
werd het bedrijf overgenomen door Indola.
De waarde
van de kondensator is onzeker. Met 2uF start de motor wat moeizaam op maar werkt
goed. Met 4uF verloopt het starten beter maar merken we wel nogal wat verwarming
van de motor op. De formule voor de berekening van de kondensator ( C=P.r.1000
/ U.U.f) levert 3.6uF op wanneer we voor r (rendement in procent) 70 invullen
en de werkspanning op 240V nemen. P is het nominaal vemogen , U de werkspanning
en f de frekwentie. Een klassieke 3-fasige motorcontroller zullen we dus niet
kunnen gebruiken hier. We zullen veeleer de aanpak moeten overnemen van wat
we deden in bouw en ontwerp van onze <Pos> robot,
een orgeltje, al is daar nog heel wat ruimte voor verbeteringen... De fabrikant,
EMI, is een bedrijf dat werd opgericht in 1897 en zich in het interbellum ging
specialiseren in ventilatoren. Toen was het gevestigd in Zaltbommel. In 1963
werd het bedrijf overgenomen door Indola.
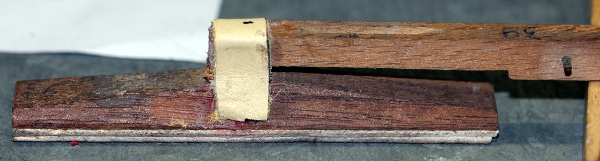
17.09.2025: De vijsjes waarmee de doorslaande tongen bevestigd zijn, blijken
allemaal erg roest. We gaan ze moeten vervangen met messing exemplaren, zoals
het eigenlijk hoort in de professionele instrumentenbouw..  Op de foto zien we onderaan de tongen voor het 16-voet register (noten 24 tot
52) en bovenaan het 8-voet register (noten 36 tot 64). De tongen voor de noten
30 en 41 in het 16-voet register blijken niet origineel te zijn.
Op de foto zien we onderaan de tongen voor het 16-voet register (noten 24 tot
52) en bovenaan het 8-voet register (noten 36 tot 64). De tongen voor de noten
30 en 41 in het 16-voet register blijken niet origineel te zijn.
18.09.2025: Immunotherapie... dus weinig tijd voor verder werk aan <Ubu>.
Messing bolkopvijsjes 2mm x 10 mm niet meer verkrijgbaar bij De Coene-Simons...
We zullen bij Fabory op zoek moeten gaan. Bij deze is ook de naam van het bouwprojekt
bepaald. Projekt getoond en uitgelegd aan Mattias Parent.
19.09.2025: Dertig elektromagneten besteld bij Conrad (ca. 500 euro...). Diameter
16 mm , 5.5 Watt, 12 V. Dit is hetzelfde type als gebruikt voor de <Sper>
robot. Windlade in twee stukken gezaagd, aangezien we alleen de baskant willen
aanwenden hier. De struktuur van de Helmholtz resonatoren is nu helemaal duidelijk.
20.09.2025: Nieuwe afsluitende zijwand gemaakt in meranti hout, 26 mm dik, 295
x 79 mm. Vastgezet met 4 inox schroeven en lijm. Dit stuk moet in principe nooit
meer losgenomen worden.
21.09.2025: Windlade gesloten; aansluiting van alvast 1 windinlaat, diameter
40mm, gemaakt zodat we een eerste test kunnen doen. Radiaalkompressor eveneens
van een aanpasstuk voor soepele pneumafoonslang voorzien. De geluidsterkte van
de laagste tongen blijkt bij deze eerste proefnemingen erg onbevredigend: is
de druk te laag of hebben we te weinig lucht? Ook het aanspreken van de lage
tongen is erg moeizaam. De schade door houtworm aan de tooncancellen blijkt
erger dan op het eerste zicht beoordeeld.
22.09.2025: Windlade helemaal dicht gemaakt, maar de houtwormgaten blijven nog
bijzonder veel lucht te laten ontsnappen... Alle tongen in het 16' register
spreken nu wel aan, zij het heel traag voor de laagste kwint. Alle kleppen losmaken
en het hele bovenblad grondig behandelen en dichtstoppen van alle gaatjes en
barstjes blijkt noodzakelijk. Levering door Conrad van de nodige solenoiden,
type ITS-LZ-1642-D-12VDC. Kostprijs: 532 Euro.
23.09.2025: Konstruktie van de drager voor de elektromagneten: inox plaat, 2
mm dik, geplooid onder 90 graden. Lengte: 490 mm. Alle gaten geboord, diameter
11.5 mm.  Wormgaatjes gestopt
met zgn. kneedbaar hout. Bovenplaat waarop de paletten rusten terug helemaal
vlakgeschuurd en barstjes gedicht.
Wormgaatjes gestopt
met zgn. kneedbaar hout. Bovenplaat waarop de paletten rusten terug helemaal
vlakgeschuurd en barstjes gedicht.
 Winddichting aangebracht
voor de onderste afsluitplank.
Winddichting aangebracht
voor de onderste afsluitplank.
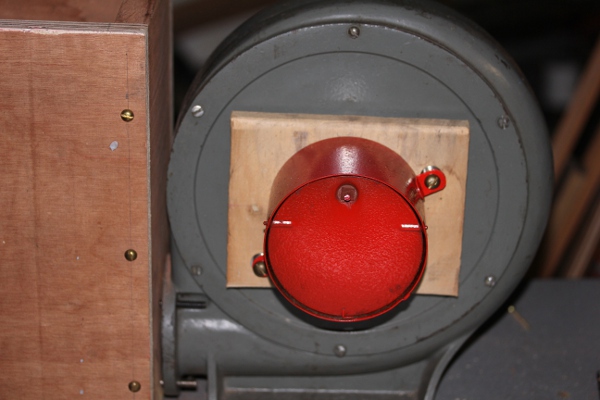
24.09.2025: Testmontage van enkele elektromagneten:  Konstruktie van een windklep -tevens geluidsdemper- op de inlaat van de radiaalkompressor:
Konstruktie van een windklep -tevens geluidsdemper- op de inlaat van de radiaalkompressor:
 De bevestiging op de motor
is met acht M4 boutjes. Konstruktie en ontwerp van de windbuffer met aansluiting
op de motor. Raar maar waar: de aansluiting op de uitlaat maakt gebruik van
1/4" imperiale schroefdraad...
De bevestiging op de motor
is met acht M4 boutjes. Konstruktie en ontwerp van de windbuffer met aansluiting
op de motor. Raar maar waar: de aansluiting op de uitlaat maakt gebruik van
1/4" imperiale schroefdraad...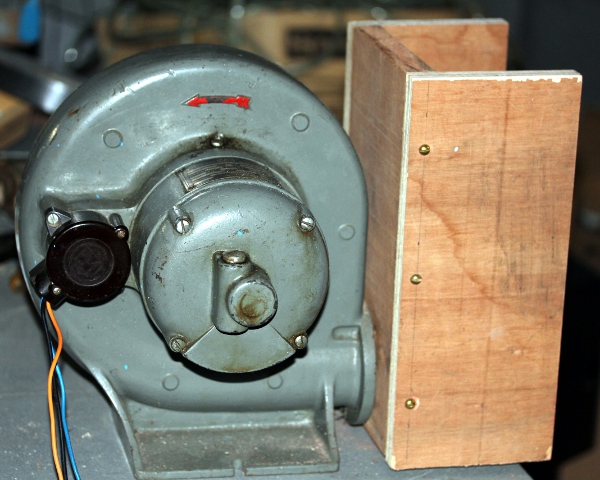 De 40 mm aansluitingen voor de windvoorziening naar de windlade komen aan de
bovenkant. Die voor <Melauton> aan de vertikale voorzijde.
De 40 mm aansluitingen voor de windvoorziening naar de windlade komen aan de
bovenkant. Die voor <Melauton> aan de vertikale voorzijde.
25.09.2025 - 26.09.2025: Verder werk aan de windbuffer- en verdeeldoos. Zo monteerden
we de kraan waarop <Melauton> kan worden aangesloten: 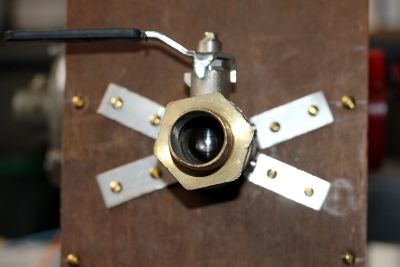 In de zijkant van de zeshoekige aansluiting boorden we vier gaatjes (3.2mm)
waarin we de M4 schroefdraad tapten. Daaraan schroefden we L-hoekjes geplooid
uit 2 mm inox plaat waarmee we de 5 1/4" kraan op het houten paneel van
de verdeeldoos stevig bevestigden. De gesloten verdeeldoos ziet er nu zo uit:
In de zijkant van de zeshoekige aansluiting boorden we vier gaatjes (3.2mm)
waarin we de M4 schroefdraad tapten. Daaraan schroefden we L-hoekjes geplooid
uit 2 mm inox plaat waarmee we de 5 1/4" kraan op het houten paneel van
de verdeeldoos stevig bevestigden. De gesloten verdeeldoos ziet er nu zo uit:
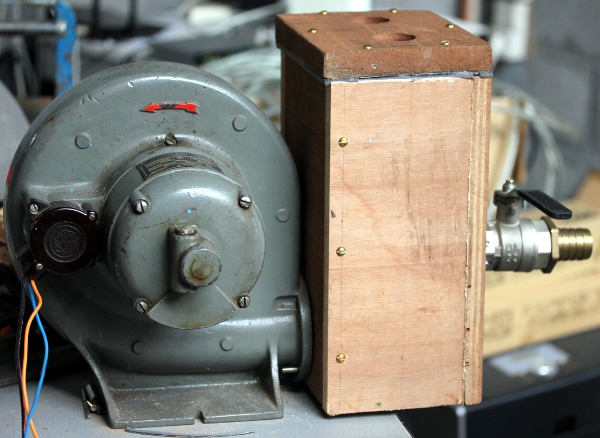 De aansluitingen voor
het harmonium zitten aan de bovenkant.
De aansluitingen voor
het harmonium zitten aan de bovenkant.
27.09.2025: Verdeeldoos van een laagje vernis voorzien. Ontwerp en begin konstruktie
van het onderste deel van het wielstel. De afmetingen van de robot liggen nu
zo goed als vast: 650 mm breedte, 350 mm diepte. De hoogte -nog wat onzeker
nu- ca. 750 mm. Laswerk onderstel.  Konstruktie
van de 10 mm doorlopende as voor de achterwielen, diameter 250 mm.
Konstruktie
van de 10 mm doorlopende as voor de achterwielen, diameter 250 mm.
28.09.2025: Zwenkwielen aan de voorkant zouden een bouwhoogte moeten hebben
van 120 mm. We hebben echter slechts wielen van 100 mm op voorraad. 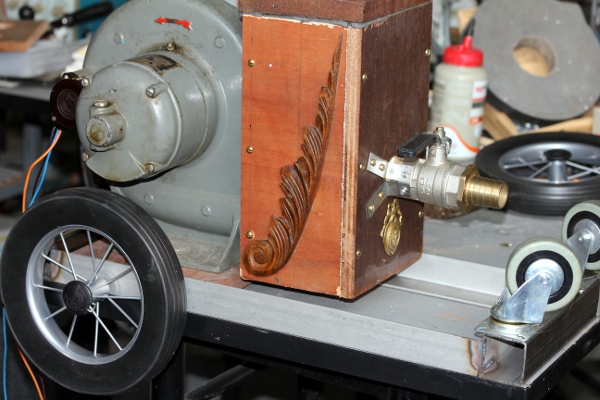 We
gaan ze dan maar op afstandsbussen monteren. U-dragers gelast. Voor de vertikale
delen gebruikten we inox buis 22 mm x 2. Zaaglengte acheraan 450 mm, vooraan
493 mm. De horizontale legger achteraan is 40 x 40 x 3 x 300 L-profiel, die
vooraan is plat inox 50 x 3 x 300
We
gaan ze dan maar op afstandsbussen monteren. U-dragers gelast. Voor de vertikale
delen gebruikten we inox buis 22 mm x 2. Zaaglengte acheraan 450 mm, vooraan
493 mm. De horizontale legger achteraan is 40 x 40 x 3 x 300 L-profiel, die
vooraan is plat inox 50 x 3 x 300 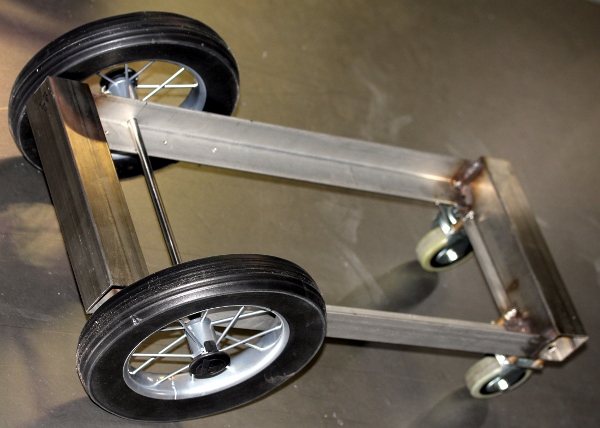 .
.
29.09.2025: Lassen van de vertikale buizen en eerste proefmontage:  Zicht met radiaalkompressor:
Zicht met radiaalkompressor: 
30.09.2025: Berekening van de dimensionering van de voedingen. Wanneer we de
houdspannning op 12V nemen, moet de overeenkomstige voeding een vermogen kunnen
leveren van 160 W, bij onbepekte polyfonie. (dus 19 noten). Bij 9 V hold-spanning
en volledige polyfonie, kunnen we volstaan met een 100 W voeding. De vraag is
alleen of de kompressor wel voldoende lucht levert voor 29 noten simultaan...
Atelierwerk ligt stil omwille van raad van bestuur waarop bijzonder pijnlijke
beslissingen moeten worden genomen...
01.10.2025: Voorzieningen genomen in GMT voor een volledige ondersteuning van
<Ubu>. Ook een icoontje maakten we aan:  Een
12V - 100W schakelende voeding hebben we nog op voorraad, alleen de 4A/traag
zekering binnenin was bij een eerdere toepassing gesneuveld. Die voeding kan
afgeregeld worden tot zelfs 9V. Ook een 24V 6.3A voeding hebben we nog in voorraad,
merk XP-Power. Extra kosten voor voedingskomponenten zullen we dus niet hebben.
Een MP240D4 zero-cross optisch gescheiden relais moeten we opnieuw bestellen
bij Farnell. Kost, ca. 50 euro. De montage van de voedingen kan, mits we geschikte
beugels maken, onderaan de robot gebeuren.
Een
12V - 100W schakelende voeding hebben we nog op voorraad, alleen de 4A/traag
zekering binnenin was bij een eerdere toepassing gesneuveld. Die voeding kan
afgeregeld worden tot zelfs 9V. Ook een 24V 6.3A voeding hebben we nog in voorraad,
merk XP-Power. Extra kosten voor voedingskomponenten zullen we dus niet hebben.
Een MP240D4 zero-cross optisch gescheiden relais moeten we opnieuw bestellen
bij Farnell. Kost, ca. 50 euro. De montage van de voedingen kan, mits we geschikte
beugels maken, onderaan de robot gebeuren.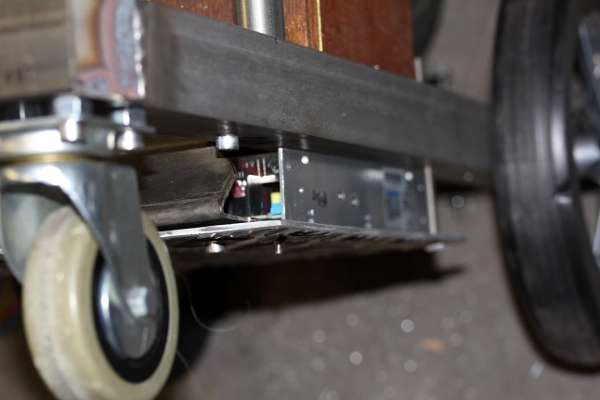
02.10.2025: Terug uit het ziekenhuis na een behandeling met immuuntherapie,
terug aan de slag: nameten van de minimaal noodzakelijke houdkracht evenals
van de minimale aanslagspanning. Kleven van enkele Teflon strookjes op de pallethefbomen
zodanig dat onze rubber voetjes wat kunnen glijden. Dit Teflon plakband hadden
we nog op voorraad na de konstruktie van de <Reco>
robots.
03.10.2025: Konstruktie van de dragers voor de vorsetzer uit aluminium profiel.
Ontwerp reflekterend deksel en de scharnierstruktuur ervoor. 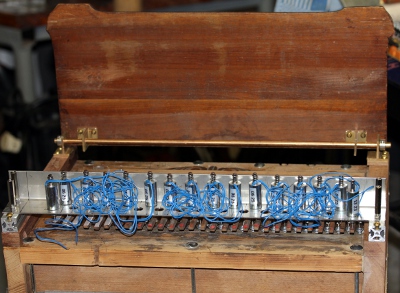 De
horizontale trajektbegrenzing is uitgevoerd met 8 mm stelringen. Voor de as
gebruikten we brons, nog een restant van de bouw van onze <Rodo>
robot..
De
horizontale trajektbegrenzing is uitgevoerd met 8 mm stelringen. Voor de as
gebruikten we brons, nog een restant van de bouw van onze <Rodo>
robot..


04.10.2025: Ontwerp en konstruktie van de drager voor de voedingsmodules die
een plaats krijgen onderaan in de robot. Bouwhoogte 45 mm, montage op een stuk
aluminium traanplaat, 240 x 250 mm.Vastgemaakt met vijf M6 bouten. Montage van
de elektromagneten op de vorsetzer met Loctite schroefdraadborging (Blauw ;
M14 schroefdraad). Het wordt stilaan tijd om de PCB's in produktie te nemen
nu...
05.10.2025: Studie van de mogelijke plaatsing voor de PCB's. Achteraan en zijdelings?
De kabelboom kan dan aan de bovenzijde onder de scharnier geleid worden.
06.10.2025: Voor de pulse-hold boards kunnen we het na produktie verbeterde
ontwerp uit 2024 voor de <Sper> robot gebruiken. Deze PCB file is gedateerd
20.03.2024. Voor het hub board kunnen we uitgaan van het board ontworpen voor
<Pos>, maar hier voorzien voor twee opto-relais. Hier is het nieuwe ontwerp:
 Een maximum van 6 lichtjes is
voorzien op deze print. Beide ontwerpen stuurden we door naar Polo om de films
op 100% grootte aan te maken. De overigens prijzige opto-relais bestelden we
meteen bij Farnell. Twee types zijn geschikt: MP240D4 (wat we eerder gebruikten
voor <Pos>) en -heel wat goedkoper- CX240D5. Beide types zijn van Crydom.
Een maximum van 6 lichtjes is
voorzien op deze print. Beide ontwerpen stuurden we door naar Polo om de films
op 100% grootte aan te maken. De overigens prijzige opto-relais bestelden we
meteen bij Farnell. Twee types zijn geschikt: MP240D4 (wat we eerder gebruikten
voor <Pos>) en -heel wat goedkoper- CX240D5. Beide types zijn van Crydom.
07.10.2025: Uitzagen en monteren montagepaneel in polykarbonaat voor de pulse-hold
boards. Een eerste board konden we reeds monteren want op overschot van <Sper>.
Farnell levering optorelais en Weidmueller 2-polige through hole konnektors.
Helaas het foute type (Weidmuller, Farnell ordercode 250-9467) want deze blijken
gesloten aan de zijkanten en passen dus niet op onze printen. Elektronisch schema
in overeenstemming gebracht met de feitelijke lay-out van de gedrukte schakeling.
08.10.2025: Drie testprocedures toegevoegd aan de mRobot.exe compilatie in GMT:
motorsturing, toonladder en stemprocedure. Nazicht voorradige power MOSFET's.
Voor de hold mosfets hebben we nog voldoende PHP79NQ08LT
exemplaren, dit type wordt niet meer gefabriceerd. Voor de pulse mosfets hebben
we IRF135 op voorraad.
09.10.2025: Bestukking midi-hub board. 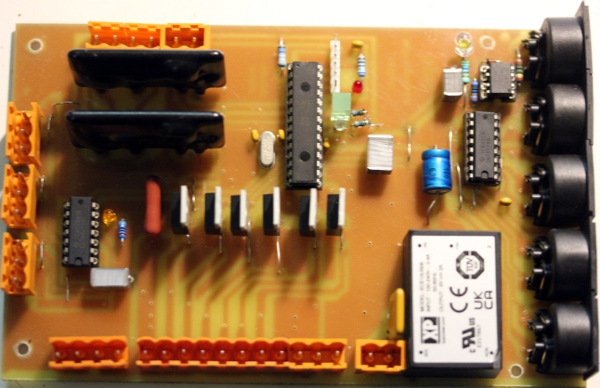 Eerste
versie van firmware ingeladen. Hardware is o.k. nu. Polykarbonaat dragerplaat
voor dit board geboord.
Eerste
versie van firmware ingeladen. Hardware is o.k. nu. Polykarbonaat dragerplaat
voor dit board geboord.
10.10.2025: Verder werk aan de hub firmware. Automatisering van de winddruk
in funktie van de gevraagde noten geimplementeerd.
11.10.2025: Test optorelais besturing onder netspanning -met gloeilamp als belasting-
geslaagd. 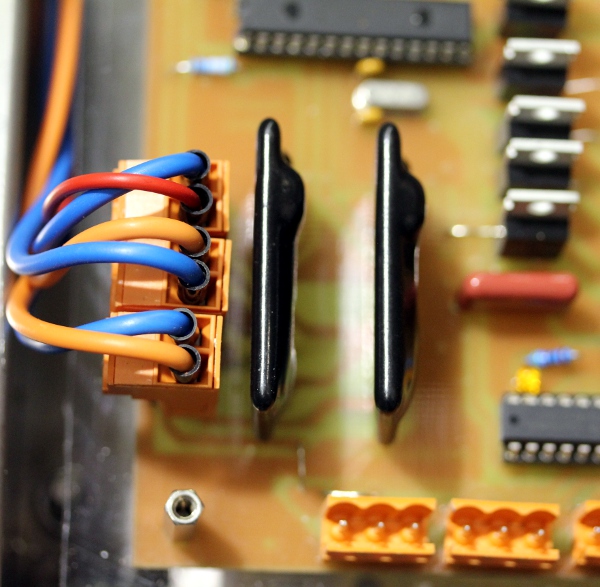 Board gemonteerd
in de robot. Merkwaardige fout: voor het eerst weigert de rode LED die op alle
boards van onze robots te vinden is, een teken van leven te geven. Na lang zoeken
vonden we de fout in de firmware:
Board gemonteerd
in de robot. Merkwaardige fout: voor het eerst weigert de rode LED die op alle
boards van onze robots te vinden is, een teken van leven te geven. Na lang zoeken
vonden we de fout in de firmware:
MAIN:
'High Debug_Led
'DelayMS 10 ' wait for stability
'Low Debug_Led
We markeerden bovenstaande sektie als kommentaar omdat een 66 ms wacht-instruktie
reeds was opgenomen in de 18F2620 include file,
met als gevolg dat de poort voor de Debug_Led nu niet langer als output werd
gekonfigureerd. Daardoor kon de assembler instruktie btg Debug_Led in de timer1
interrupt handler geen enkel effekt meer hebben. De high_Debug_Led regel dienden
we dus zeker op te nemen.
12.10.2025: De motor sturing blijkt goed te werken hoewel de motor bijzonder
traag op snelheidswisselingen reageert. Misschien moeten we de periode tijd
(nu 500ms) halveren. Nu alles goed is afgedicht, worden we echter gekonfronteerd
met ernstige lekken op de klepjes. Uiteraard is het niet de bedoeling de wind
op maximum in te stellen en geen noten te spelen... Vanwege de traagheid van
de motor, lijkt het echter onmogelijk om dit in de firmware onmogelijk te maken.
13.10.2025: Nog wat gesleuteld aan de motor besturing. Boren en bestukken van
de twee nog ontbrekende maar zwaar gehavende pulse-hold boards, zwaar gehavend
als gevolg van vervuiling op de glasplaat van de belichtingsmachine bij Polo.
Daardoor waren heel wat printbaantjes onderbroken. We hadden de fout op de film
helaas niet voor het etsen opgemerkt. We herstelden de printplaatfouten met
stukjes wire wrap draad. 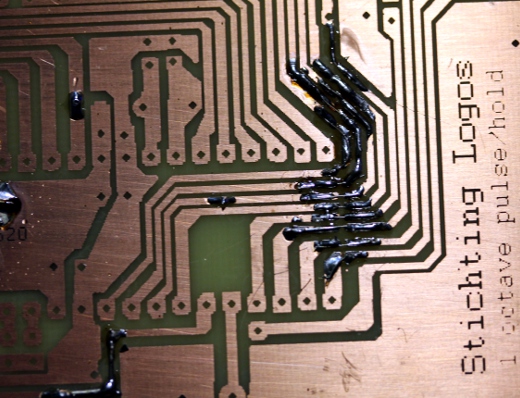 Draadkleurkodes
zoals toegepast:
Draadkleurkodes
zoals toegepast:
| 24 |
zwart-zwart |
PH1 board 22.12.2021 |
pin 39 hold
pin 38 velo
|
| 25 |
bruin-bruin |
|
|
| 26 |
wit/rood |
|
|
| 27 |
oranje |
|
|
| 28 |
geel |
|
|
| 29 |
groen |
|
|
|
30
|
blauw |
|
|
| 31 |
violet |
|
|
| 32 |
grijs |
|
|
| 33 |
wit |
|
|
| 34 |
geel/zwart |
|
|
| 35 |
groen/geel |
|
pin 20, C.3 hold
pin 8, B.0 velo
|
| 36 |
zwart |
PH2 board |
|
| 37 |
bruin |
|
|
| 38 |
wit/rood |
|
|
| 39 |
oranje |
|
|
| 40 |
geel |
|
|
| 41 |
groen |
|
|
| 42 |
blauw |
|
|
| 43 |
violet |
|
|
| 44 |
grijs |
|
|
| 45 |
wit |
|
|
| 46 |
wit/zwart |
|
|
| 47 |
geel/zwart |
|
|
| 48 |
roze/zwart |
PH3 board |
|
| 49 |
bruin |
|
|
| 50 |
wit/rood |
|
|
| 51 |
oranje |
|
|
| 52 |
geel |
|
|
3-pole Weidmueller connectors and power sockets: black= ground, red/black =
5V power, white/red = midi signal TTL
14.10.2025: Board 2 helemaal bestukt en afgewerkt. 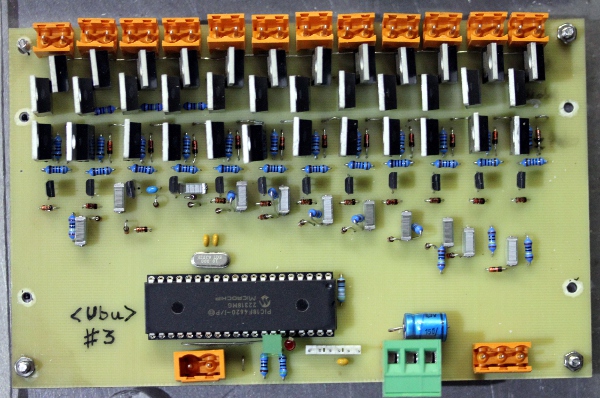 Met
board 3 zijn we nu ongeveer halfweg. Op dit board pasten we kleine ZVP4424 P-channel
mosfets toe. Dit type heeft Vds <=240V, Id <= 200mA en Rdc_on = 9 Ohm.
We bestelden deze mosfets bij RS-Components, order nr. 157-4625.
Met
board 3 zijn we nu ongeveer halfweg. Op dit board pasten we kleine ZVP4424 P-channel
mosfets toe. Dit type heeft Vds <=240V, Id <= 200mA en Rdc_on = 9 Ohm.
We bestelden deze mosfets bij RS-Components, order nr. 157-4625.
15.10.2025: Alle PCB's afgewerkt.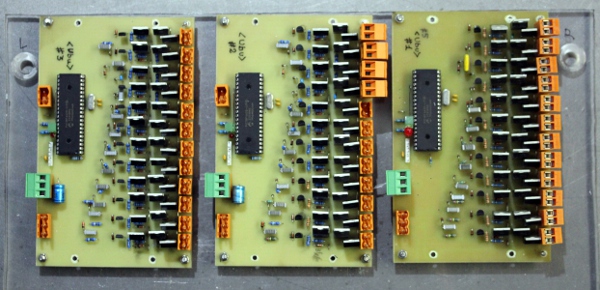 Een eerste ruwe versie van de firmware klaargemaakt en ingeladen.
Een eerste ruwe versie van de firmware klaargemaakt en ingeladen.
16.10.2025: Nog wat verdere bedrading uitgevoerd. Projekt in opbouw aan enkele
leden van het publiek op het koncert vanavond uitgelegd.
17.10.2025: Bedrading van de solenoiden aan de vorsetzer kant. 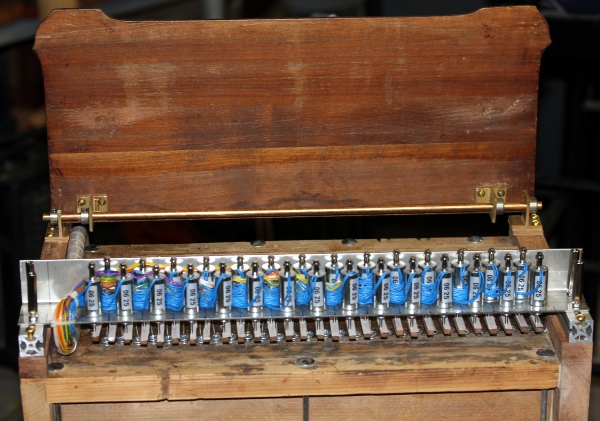 Alle
solenoiden zijn nu van draden voorzien. De andere kant met de tweepolige Weidmueller
konnektors is voor morgen...
Alle
solenoiden zijn nu van draden voorzien. De andere kant met de tweepolige Weidmueller
konnektors is voor morgen...
18.10.2025: Bedrading tweepolige Weidmueler konnektors op de achterzijde van
de robot. Aanleggen van de kabelbomen. 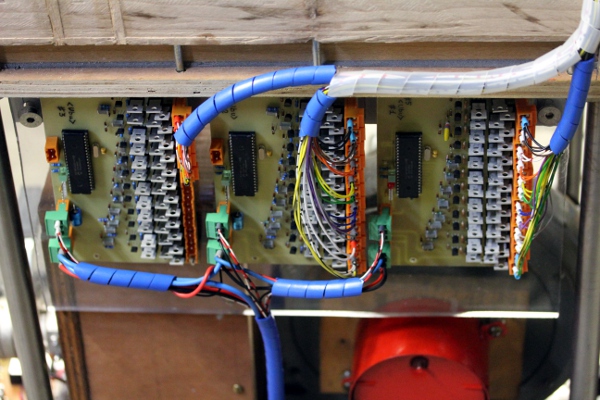 Eerste
tests: <Ubu> speelt zijn eerste nootjes...
Eerste
tests: <Ubu> speelt zijn eerste nootjes...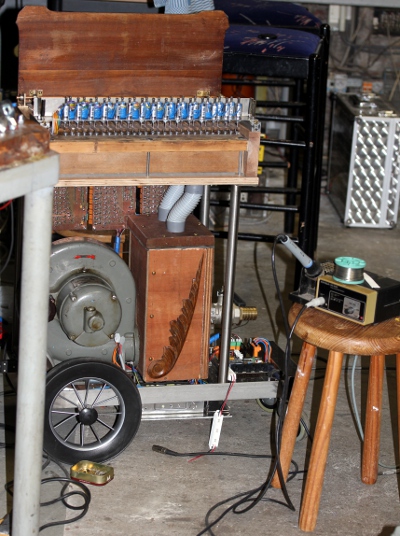
19.10.2025: Debug sessie. Pulse-hold board doet het niet. Er is een bug in de
note mappings op de poorten. Midi hub board: red LED refuses to work. Same problem
as we had with the pulse-hold boards. Controllers geimplementeerd voor de werking
van de motor: #67, waarmee de periode van de motorsturing kan worden gekozen,
#68, schakelaar voor automatische windregeling (traag) versus gebruikers regeling.
Hub board losgenomen en opnieuw geprogrammeerd. Testkode toegevoegd binnen GMT
in de m_robots kompilatie.
20.10.2025: PH1 board losgenomen, grondig nagezien met de skoop (alle pulsen
en houd-signalen o.k. bevonden), en terug gemonteerd in <Ubu>. GMT upgrade
uitgevoerd op de \\hp laptop. Controller #70 geimplementeerd om de noten 53
tot 64 speelbaar te maken hoewel het niet anders zal klinken dan de noten 41
tot 52. Board PH2 losgenomen en opnieuw geprogrammeerd. Tests op Ubu o.k. Alleen
de 16-voet rieten voor de noten 49 en 50 spreken niet aan en moeten gereinigd
en nagezien worden. Controllers 70, 80 en 81 geimplementeerd. Alle noten spreken
goed aan met velocity = 6. We mogen de scaling in de firmware dus zeker een
faktor 4 kleiner nemen. Dit heeft echter geen enkele urgentie aangezien we bij
default waarde 6 als substitutie gebruiken. Een en ander is goed gedokumenteerd
in de source code van de firmware.
21.10.2025: Velo-scaling verbeterd en meer voorzieningen getroffen voor de automatisering
van lampjes. De witte LED-strips onderaan kleefden we vast met dubbelzijdig
plakband voor tapijt. De kode voor het derde pulse-hold board stuurt nu de bovenste
-nog te monteren- lampjes. Een interne controller (#100) introduceerden we voor
dit doel. De default substitutie waarde voor velocities is nu 45. Dit noemen
we versie 1.2 voor de firmware.
22.10.2025: Testkode in GMT uitgebreid en midi-player voor files toegevoegd.
Allegro Tangabile file -Astor Piazzolla- aangepast voor <Ubu> als test.
23.10.2025: Lampjes op board3 geimplementeerd. We wachten nu op een levering
van extra voorraad van Farnell. Implementatie van een autosleep modus voor de
motor. De bedoeling is dat de motor uitgeschakeld wordt wanneer gedurende een
minuut geen noten gespeeld worden. Uiteraard voorzien we een controller (#71)
waarmee dit mechanisme ook uitgeschakeld kan worden, wat immers noodzakelijk
is wanneer we een 'kind' zoals <Melauton> willen aansluiten op de kompressoruitgang.
24-25.10.2025: Verder werk aan de implementatie van de motor sleep-mode. Dat
bleek veel meer tijd te kosten dan we hadden kunnen bedenken.Nu zijn de bugs
eruit gehaald en blijkt het goed te werken. Wanneer controller 71 geset is (de
default), en geen noten klinken, zal de motor na 30 sekonden uitgeschakeld worden.
Het is aan de gebruiker om de motor weer in te schakelen wanneer weer gespeeld
moet worden. Logos-display geimplementeerd en gemonteerd. De mapping is op noot
123 en poort RC4 op het hub-board. Het display volgt de bekrachtiging van de
motor. 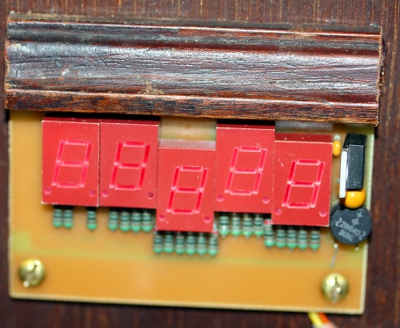 Dit automatisme kan
niet uitgeschakeld worden.
Dit automatisme kan
niet uitgeschakeld worden.
26.10.2025: Automatische power-down geimplementeerd. Na 1u45' inaktiviteit schakelt
de robot zichzelf uit. Een kleine bijdrage tot de ekologie... Fel witte LED
strip gemonteerd op de voorkant van de Vorsetzer. Besturing hiervan vanuit pulse-hold
board nr.3.
27.10.2025: Farnell levering -met grote vertraging- toegekomen... we kunnen
verder werken aan de lichtjes op <Ubu>. Voor de montage van de bas en
trebble lichtjes gebruiken we enkele stukjes 19e eeuws versierd messing kokerprofiel,
afkomstig van de messing angklung uit de erfenis van Norbert Rosseau. Deze angklung
werd in 2000 de basis voor onze <Klung> robot.
Hier twee foto's van die stukjes art-deco profielen: 

28.10.2025: Aanleggen van de kabelbomen en afwerking van de bedrading voor de
lichtjes. 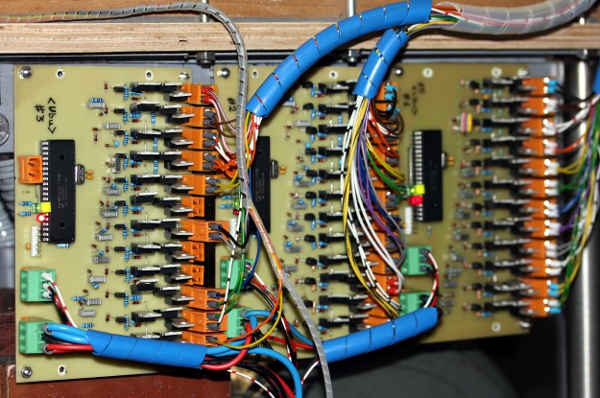 Testkode toegevoegd
in GMT. Verder debugging van pulse-hold board 3 (lichtjes). Het display is nu
niet langer gemapt op een midi-noot. Het kan dus niet meer uitgeschakeld worden
wanneer de motor draait. De groene LED strip, gemapt op noot 124 en bestuurd
vanuit het derde puls-hold board, werkte wellicht niet vanwege een hardware
bug: de soft release komponenten op de HPWM2 poort, spreken de werking van de
PWM tegen. We moeten de Shottky-diode en de 47nF kondensator op die poort verwijderen?
Testkode toegevoegd
in GMT. Verder debugging van pulse-hold board 3 (lichtjes). Het display is nu
niet langer gemapt op een midi-noot. Het kan dus niet meer uitgeschakeld worden
wanneer de motor draait. De groene LED strip, gemapt op noot 124 en bestuurd
vanuit het derde puls-hold board, werkte wellicht niet vanwege een hardware
bug: de soft release komponenten op de HPWM2 poort, spreken de werking van de
PWM tegen. We moeten de Shottky-diode en de 47nF kondensator op die poort verwijderen?
29.10.2025: Pulse-hold board losgenomen en deze wijzigingen uitgevoerd: 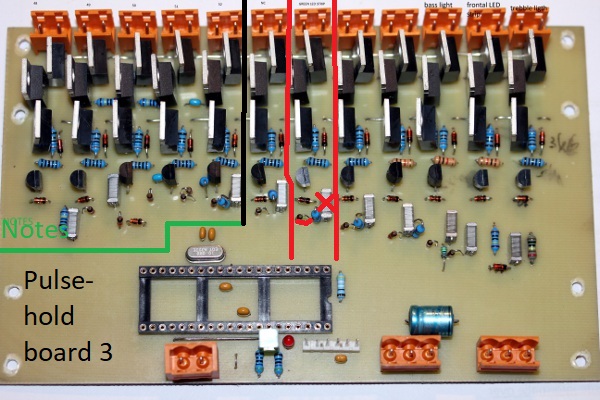 Desondanks bleek de PWM dan nog steeds niet te werken... Na lang zoeken, de
bug gevonden. Volgende statements voor pin-toewijzingen bleken te ontbreken
in de 18F4820.inc include file: Declare HPWM1_Pin = PORTC.2
en Declare HPWM2_Pin = PORTC.1. De pwm werkt nu
perfekt zowel voor het groene licht als voor beide rode strips onder het hub-board.
Meteen de firmware van een upgrade voorzien waardoor we nu de lichtsterkte van
de rode led strips en van de groene strip kunnen regelen met het key-pressure
commando in midi. Dit kan dus voor de noten 122,123 en 124.
Desondanks bleek de PWM dan nog steeds niet te werken... Na lang zoeken, de
bug gevonden. Volgende statements voor pin-toewijzingen bleken te ontbreken
in de 18F4820.inc include file: Declare HPWM1_Pin = PORTC.2
en Declare HPWM2_Pin = PORTC.1. De pwm werkt nu
perfekt zowel voor het groene licht als voor beide rode strips onder het hub-board.
Meteen de firmware van een upgrade voorzien waardoor we nu de lichtsterkte van
de rode led strips en van de groene strip kunnen regelen met het key-pressure
commando in midi. Dit kan dus voor de noten 122,123 en 124.
30.10.2025: Hospitaal-dag voor CT scan en immuuntherapie... <Ubu> in het
robotorkest geplaatst zodat Kristof Lauwers er meteen mee aan de slag kan. Meteen
ook de wielassen van voldoende grote groeven voorzien ter verankering van de
spaakwielen. Die kunnen nu alvast niet meer loskomen bij het verrijden van de
robot.
04.11.2025: Ondersteuning van <Ubu> in de GMT player afgewerkt.
05.11.2025: Harmonium gedeelte vastgezet op onderstel met drie messing bolkop
schroeven 4 x 25.
09.11.2025: Onderdelen bijeengezocht voor de konstruktie van een 'klopgeest'.
10.11.2025: Start inbouw en voorzieningen voor de klopgeest. De midi mapping
zal noot 119 zijn. GMT testkode toegevoegd in m_robots.exe. Firmware voor board
3 alsook voor het hub board aangepast.
11.11.2025: Velo-scaling voor de klopgeest geoptimaliseerd. Het velo midi bereik
van 1 tot 127 komt nu overeen met een pulsduurbereik van 3,125 ms tot 12,5 ms.
Hoge repetitiesnelheden blijken goed mogelijk.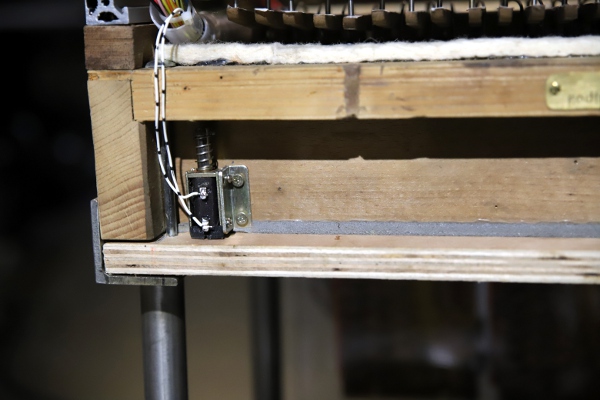
19.11.2025: Publieke voorstelling van de <Ubu>< robot.
References:
- Benade, Arthur .H., "Fundamentals of Musical Acoustics". Ed.:
Oxford University Press, 1976.
- Goddijn, Hans "Bouw zelf uw elektronisch orgel", ed. Kluwer,Deventer
1977. (ISBN 90 2010 851 4)
- Ord-Hume, Arthur W.J. "Barrel Organ"
- Raes, Godfried-Willem, "Kursus Akoestiek", Ghent University College
1982/2014, Internet: http://www.logosfoundation.org/kursus/4023.html
- Raes, Godfried-Willem, "Expression
control in musical automatons", 1977/2020,
- Raes, Godfried-Willem, "Logos @ 50, het kloppend hart van de avant-gardemuziek
in Vlaanderen", ed. Stichting Kunstboek, Oostkamp, 2018.
- Raes, Godfried-Willem, "Muzikale Robots", 2025
by Godfried-Willem Raes
Maintenance instructions:
Circuit overview: 
PCB- for the pulse/hold boards with slow release:
 Circuit principle for the note
pulse and hold circuit as used in this <Ubu> robot:
Circuit principle for the note
pulse and hold circuit as used in this <Ubu> robot:  The
hold-mosfet, here specified as PHP79NQ08LT is now an obsolete part. It can be
replaced with any N-channel mosfet in TO220 package and with Ug <=4V.
The
hold-mosfet, here specified as PHP79NQ08LT is now an obsolete part. It can be
replaced with any N-channel mosfet in TO220 package and with Ug <=4V.
PCB for the midi-hub board with motor-control via opto relay:
Circuit:
PCB with components:
Firmware for the hub board:
Firmware for the 3 pulse-hold boards:
Maintenance information:
Power supply 12V / 10A: Sunpower SPS 100P-12, Conrad order nr. 510315. This
12V power supply has an internal fuse, rated 4A slow.
Power supply 24 V / 6.3 A: XP Power, LCW150PS24, Farnell order nr.: 3790326
Optorelay's: Crydom CX240D5. Farnell order
nr. 1200213 (Crydom MP240D4 also works, but it's twice as expensive)
Geschatte kost voor bouw en ontwerp van deze robot
1.- materialen:
| Midi-hub board (parser, 18F2620 processor, with 2 optorelays) |
450,-
|
| Pulse-hold boards met slow release (3 boards, 18F4260 processors) |
1200,-
|
| Roestvast staal voor laswerk en konstruktie |
150,-
|
| Industriegas: argon |
100,-
|
| Zwenkwielen 125 mm |
15,-
|
| Wielen 250 mm, as 10 mm. |
|
| Lampjes en lichtmaterialen, sockets, adereindhulzen enz. |
170,-
|
| Voeding 24V - 6.3A - XP Power |
|
| Voeding 12V - 10 A - Sunpower |
|
| Elektromagneten - Conrad bestelnr. 506148, type ITS-LZ-1642-D-12VDC,
5.5W |
532,-
|
| Bedrading en isolatie |
|
| IEC netingang en zekeringen |
37,-
|
| Weidmueller 3-pole plugs (15 stuks) |
|
| Opto relais CX240D5 (twee stuks) |
68,-
|
| Weidmueller 2-pole plugs (40 pieces) |
75,-
|
| Logos-display board |
20,-
|
| Flexible LED strip 12V, white. RS-pro 8555933 |
|
| Totaal: |
|
2.- arbeid:
Start bouwprojekt: 12.09.2025
Eerste ingebruikname: 24.10.2025
